Topic 05 - Various frequencies of ultrasound
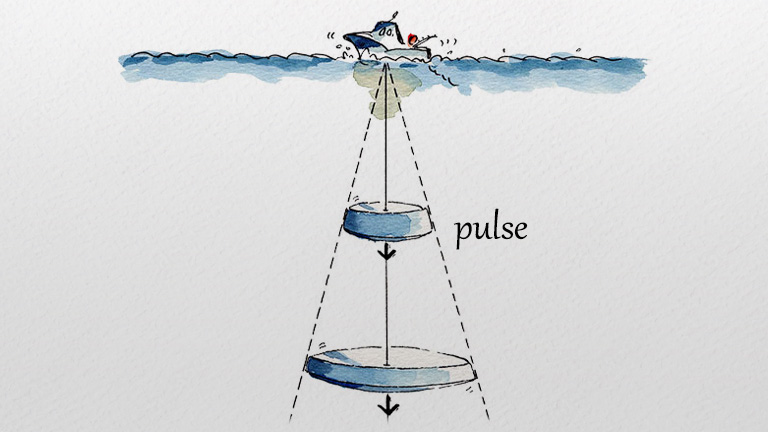
Ultrasound frequency used by a fish finder generally ranges from 15 kHz to 200 kHz. However, the majority of the conventional fish finders oriented for recreational craft utilize 50 kHz and 200 kHz. Such fish finders available in the market incorporate electronic circuitry that can transmit and receive ultrasound in these two frequencies. Also, a transducer mounted on the bottom of the craft is configured to handle these two frequencies.
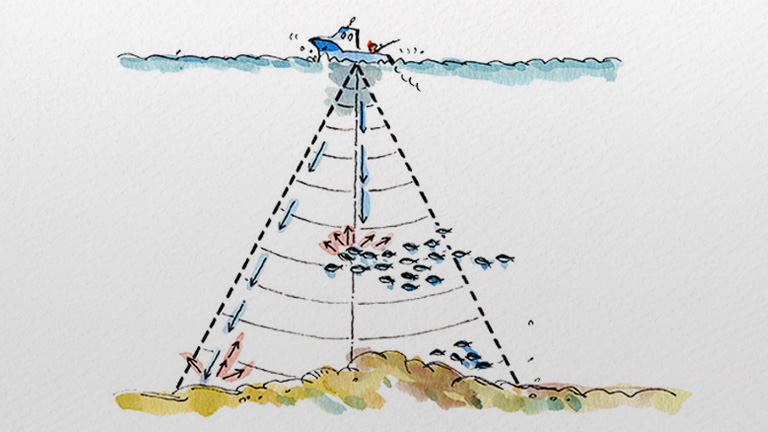
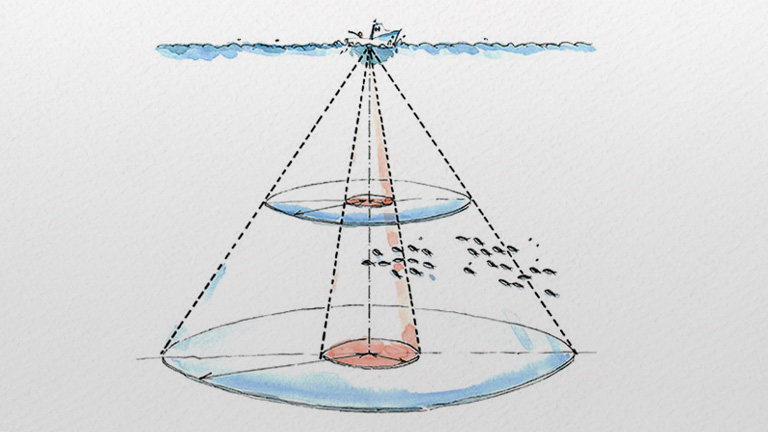
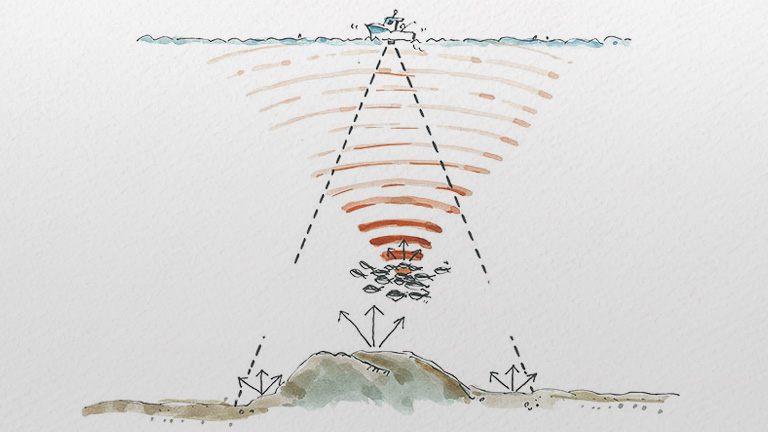
However, fish finders for professional use, i.e., those used by commercial fishermen, can make use of other frequencies. Such frequencies include 15, 22, 28, 38, 45, 50, 68, 75, 88, 107, 150 and 200 kHz. There are some special fish finders that utilize the frequency of 400 kHz, but it is quite a rare case. As you can see, there is an extensive range of configurable frequencies available for fish finders for fishery vessels, and a fish finder generally makes use of a combination of two frequencies (high and low frequencies). The selection of the frequencies depends upon the intended purposes of the fish finder, which include, inter alia, finding specific fish species; grasping the seabed condition; conducting a wide-area-search with the search angle of 90 degrees at one go; conducting detailed search for fish schools; detecting fish schools that give weak echo returns; avoiding interference/conflict with other fish finders used nearby. The searchable range (depth) and search area are dependent upon the frequency used. On the one hand, high frequency ultrasound is suitable for a detailed search, although it cannot be used for search in deep water. Low frequency ultrasound, on the other hand, is suited for general searches in a wider area as well as searching in deep water.
Commercial fishermen also make use of these characteristics. They conduct a search by low frequency (i.e., 15 kHz) beams first to grasp the general locations of fish schools around the boat. Subsequently, they narrow the search area for a fish school, using high frequency beams (200 kHz), to detect the exact location of the fish school and operate the boat to be directly above the targeted fish school.
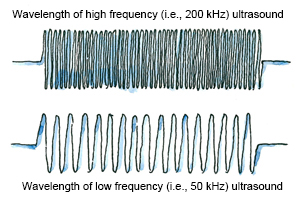
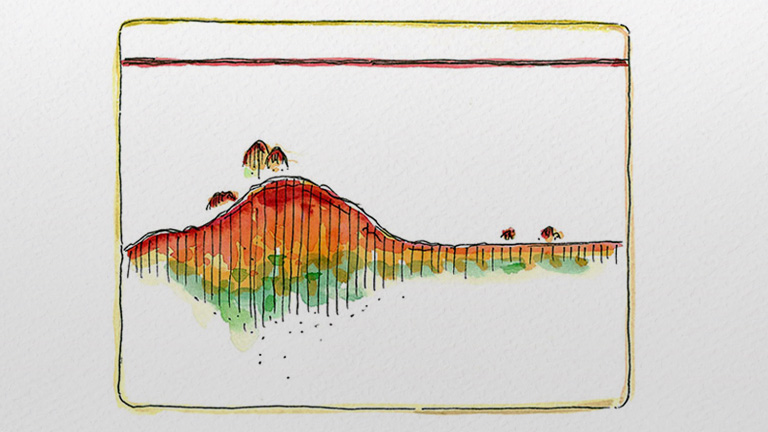
Detection range (depth) of a fish finder depends upon the frequency used for ultrasound transmission. In principle, the higher the frequency of ultrasound, the shorter the propagation range can be. The wavelength of high frequency ultrasound is short, and its directivity angle is narrow, which enables detailed searches, but it attenuates significantly while travelling through water. Low frequency ultrasound is characterised by its long wavelength, wider directivity angle and high level of tolerance toward underwater attenuation, hence enabling wide-area-searches in deeper water. To summarize, you can choose low frequency if you are searching in deep water and high frequency if you are conducting a detailed search in shallow water. Further, when using low frequency ultrasound, you may be able to conduct more precise deep-water searches by adding an optional Power Adapter, which amplifies the transmitter power to a few kilowatts. Please note, however, that when using the Power Adapter, a dedicated transducer capable of handling higher transmitter power will be needed.
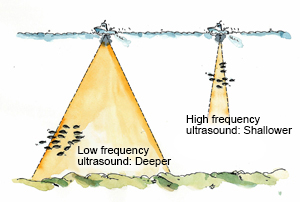
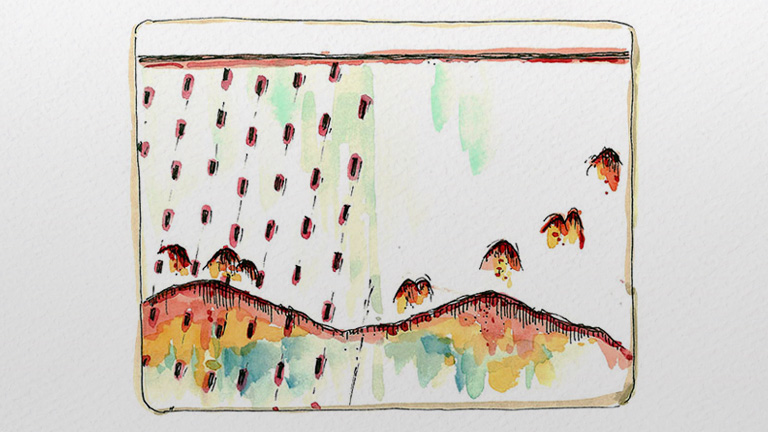
Basically, with low frequency (50 kHz) ultrasound, you can conduct deep-water search, but with high frequency (200 kHz) ultrasound, the searchable depth is not that deep.
List of Technologies