声呐基础知识
声呐工作原理
什么是声呐?
声呐是一种利用声波探测物体的设备。在捕渔业中,声呐用于探测船舶周围鱼、环境结构和海床情况,而渔探仪探测的是船的正下方的目标。声呐通过向海中发射超声波并接收反射回波来捕捉这些物体。声呐可以探测和显示360°或180°各个方向的鱼群分布、密度和移动。在日本,该系统应用于各种大中型渔船,如围网渔船、鲣鱼船等。在北欧,声呐非常受拖网渔船的欢迎。近年来,小型渔船和游船上也安装了小型化的通用声呐。
不同种类的声呐
声呐主要分为三类:探照灯声呐(PPI声呐)、扇区扫描声呐和扫描声呐。
探照灯声呐(PPI声呐)
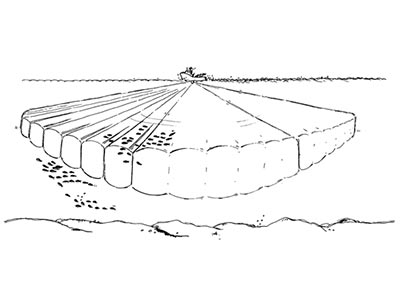
探照灯声呐是显示船只四周的水下信息的设计。声呐可以通过不断旋转传感器,以360度视角显示船只周围的鱼群和海流等信息。就像是用手电筒寻找船附近的东西。这种声呐通常安装在小型渔船上,近年来越来越多地用于游艇上。
探照灯声呐的原理1
探照灯声呐的原理2
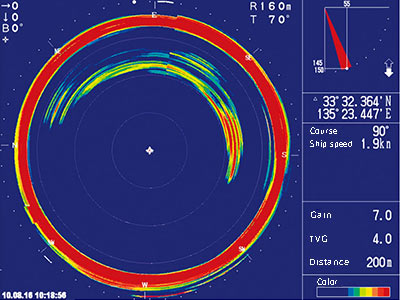
声呐通常在屏幕上显示为中心(船)的一个点,船周围被一圈回声环绕包围。
探照灯声呐从换能器(传感器)发送超声波到海底,再反射回换能器。
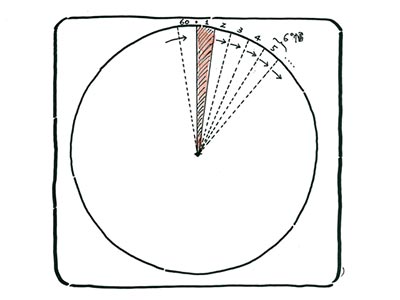
随着下一个超声波的传播,传感器的角度也随之改变。超声波一发出,声呐就会立即切换到接收状态,‘倾听’返回的超声波回声。
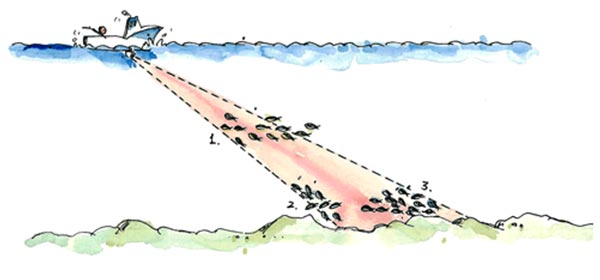
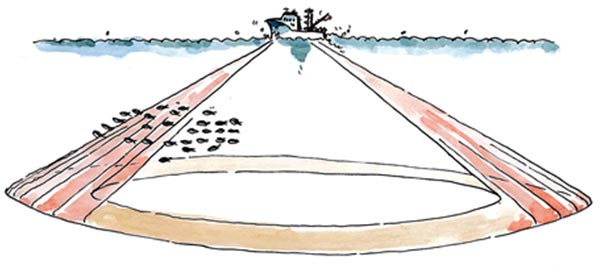
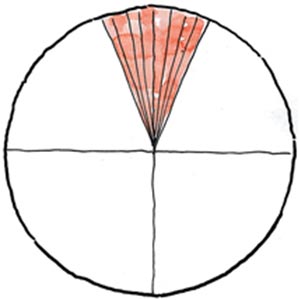
探照灯声呐的探测范围为6度。通过发射超声波,然后依次旋转波束,可以精确地搜索鱼群。由于探测角度非常窄,传感器需要时间才能完成360°旋转,而且随着船的移动,一些区域可能无法被探测到。
虽然总体探测速度较慢,但传感器部分的小型化应用使得在小船上安装探照灯声呐也成为可能。
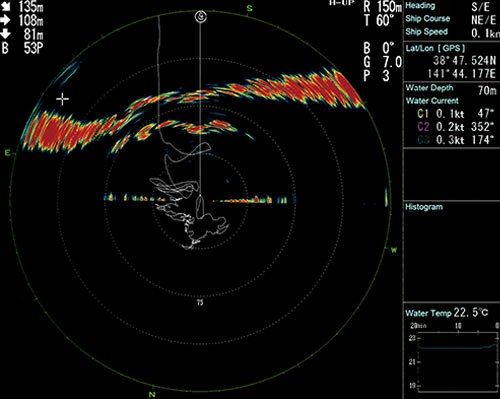
扫描声呐
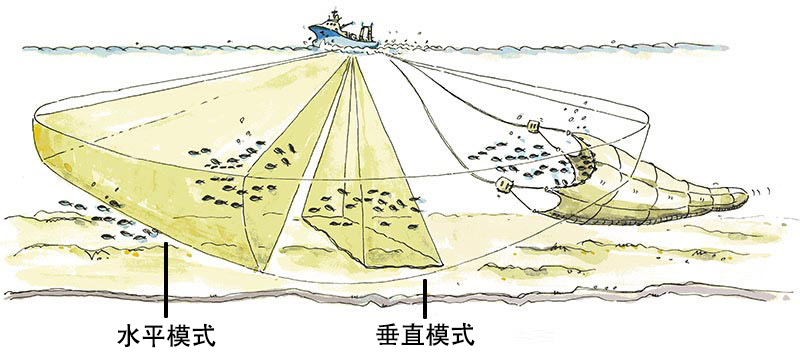
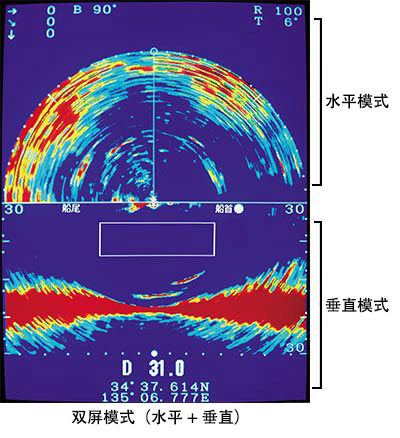
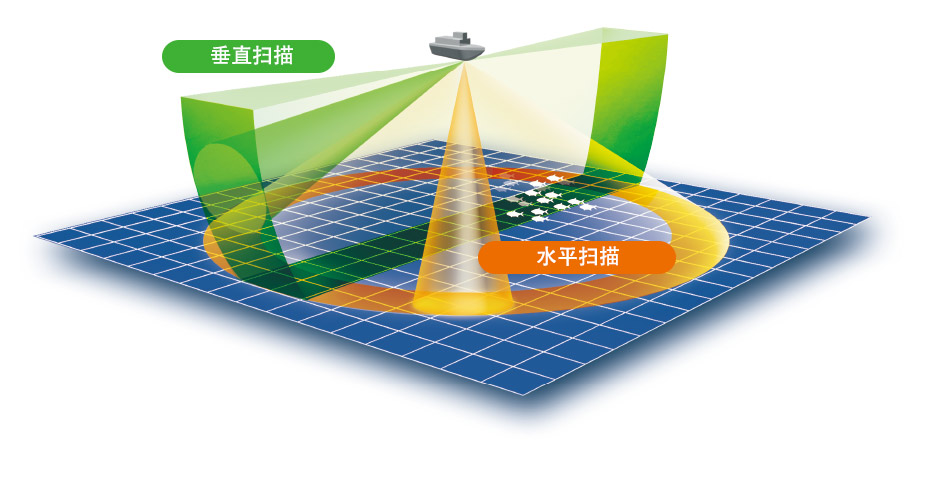
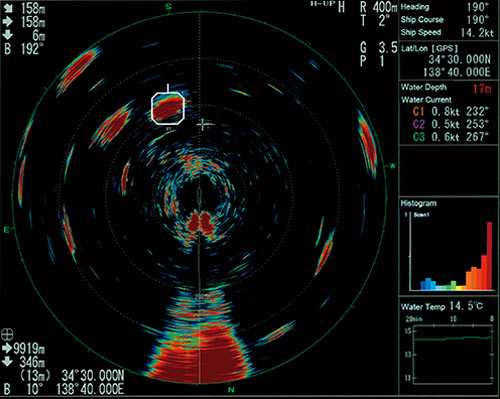
扫描声呐可以360度同时向船舶周围发出超声波,并能立即探测和显示回波。
探测速度比扫描声呐快得多,可以瞬间探测到周围的所有环境。您可以探测评估海洋中快速游动的鱼类运动,如鲣鱼和金枪鱼。
扫描声呐图
全方位扫描声呐
该系统在一次脉冲中向船舶周围的各个方向发射超声波,并能立即探测和显示船舶周围的一切。
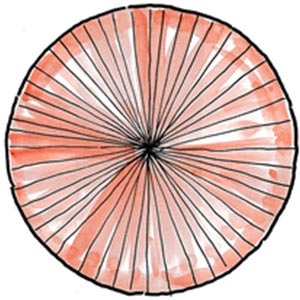
全方位扫描声呐
半周扫描声呐
安装在船底的传感器利用超声波对船下180度的区域进行即时搜索。
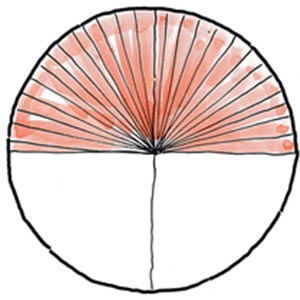
半周扫描声呐
扇形扫描声呐
原理与探照灯声呐相同,但扇形扫描声呐是以45度的步进搜索,所以该类型声呐比探照灯声呐快4 - 7倍。
扇形扫描声呐