Topic 03 - Sound and Ultrasound
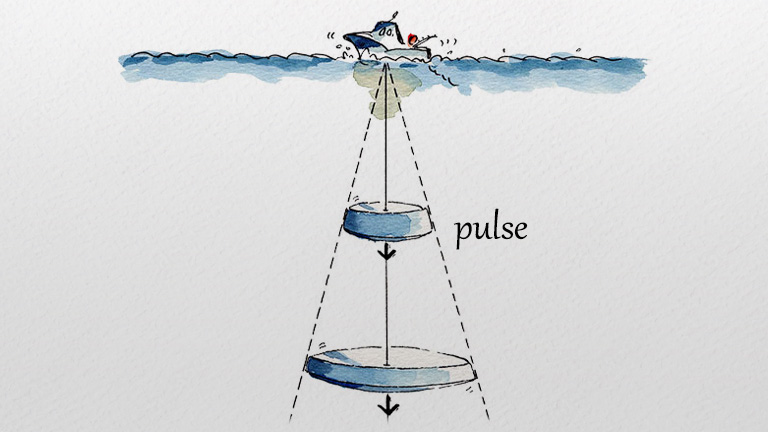
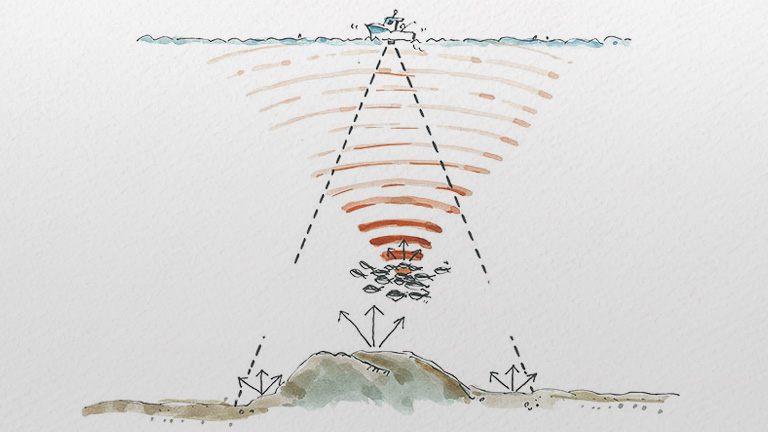
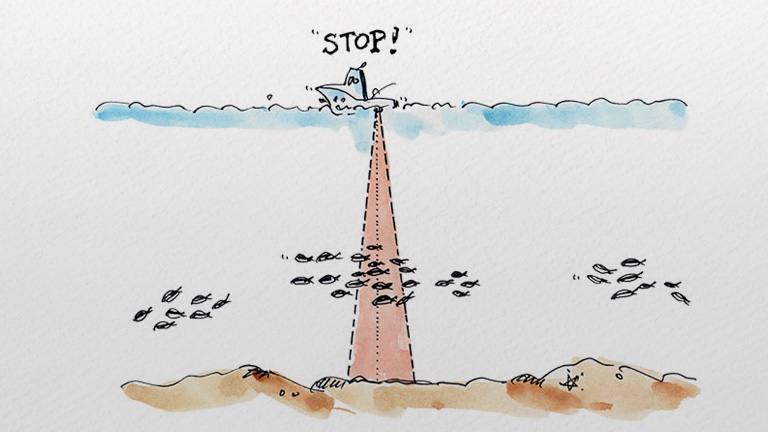
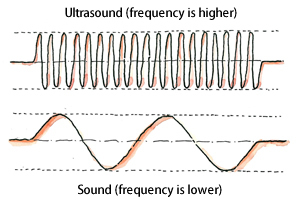
Both sound and ultrasound are, in principle, types of waves. They are just like the ripples on the water surface you see when you drop a pebble into the water. The water ripple normally spreads out 360 degrees, because of its omni-directional characteristics. A fish finder utilizes high frequencies of sharply focused ultrasound, which is transmitted with high voltage in order to determine the direction fish schools are moving. Locating objects in the air is different than locating objects underwater. To locate objects in the air, we can utilize light, radio waves or sound. However, when locating objects underwater, light and radio waves are attenuated rapidly when they travel through water, which is why ultrasound is the most viable option to locate underwater objects. Ultrasound has a high level of tolerance to underwater attenuation. The propagation velocity of ultrasound under the water is approximately 1,500 meters/sec, which is five times as fast as the propagation velocity of ultrasound in the air (340 meters/sec). This propagation velocity of ultrasound is used to calculate the depth at which a fish school is located. For example, if an echo return from a fish school is observed one second after it transmission, it can be construed that the fish school is located at the depth of 750 meters under the boat (transmitted ultrasound hits the underwater object and comes back in one second, when taking into consideration the propagation velocity of ultrasound, namely 1500 meters/sec, you get the depth at which a fish school is located). This is the basic echo-sounding principle of a fish finder.
Generally speaking, propagation velocity is proportional to the density of the medium through which light, radio waves or ultrasound travels. Light and radio waves can collect a lot of information in a short period of time, while ultrasound is more time-consuming with its underwater search. For example, ultrasound travels approximately 5,000 meters per second through a high-density medium such as iron. Although propagation velocity of ultrasound underwater is slow, ultrasound is capable of detecting information about fish schools at remarkably far distances.
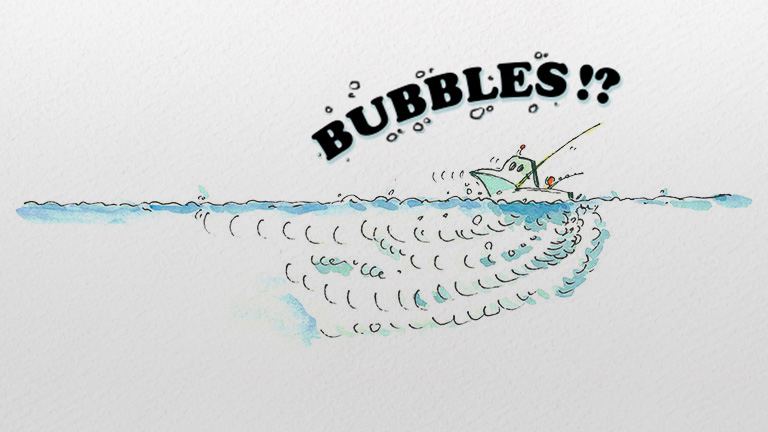
There are various sources of interference that effect the propagation of ultrasound underwater, including: current, water temperature, micro-organisms (i.e. plankton), air bubbles, radio noise, etc. Despite these sources of interference in the environment, a fish finder is capable of grasping the weak echo returns from fish schools.
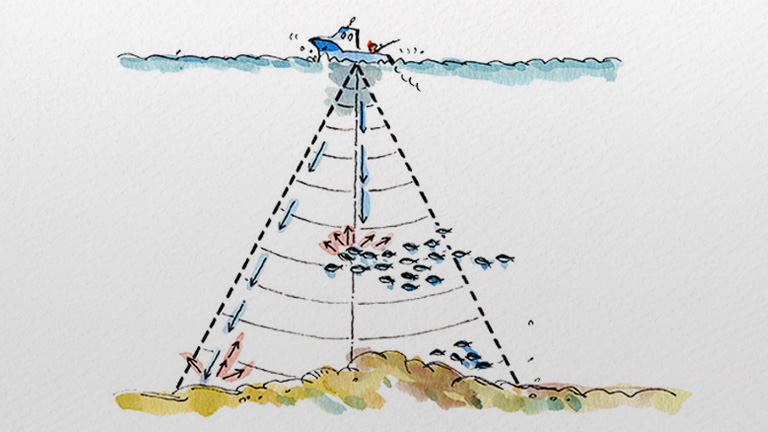
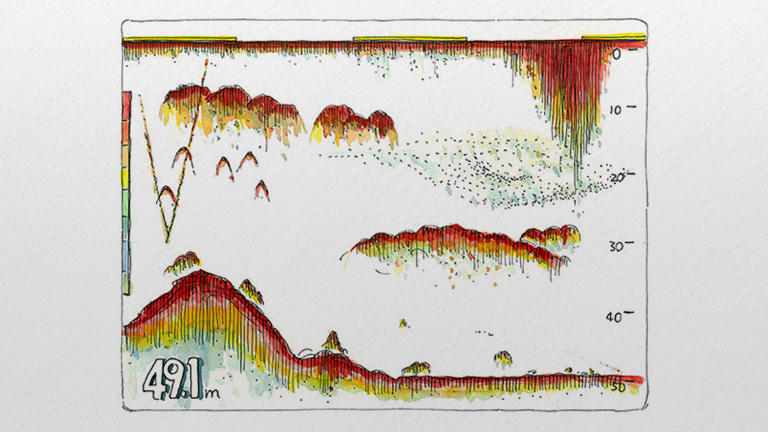
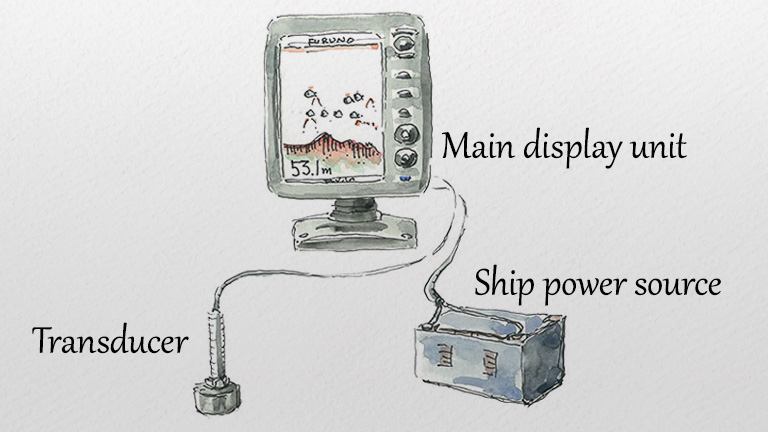
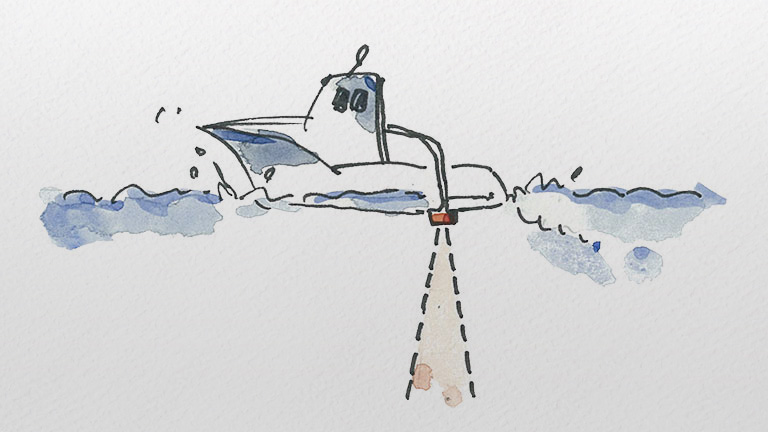
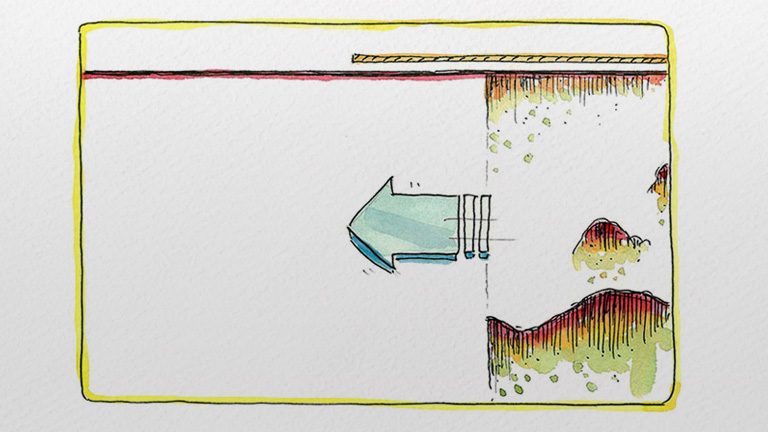
A fish finder transmits ultrasonic waves from the transducer mounted on the bottom of the boat. The transmitted ultrasonic waves advance straight towards the seabed, but if there is an object, i.e. fish school or rocks, they will reflect. Part of them will reflect back to the ship's bottom, which will then be captured by the transducer. By measuring the time elapsed between transmission and reception of ultrasound, the depth of the fish school is calculated.
List of Technologies