Sonar Basics
Structure of Sonar
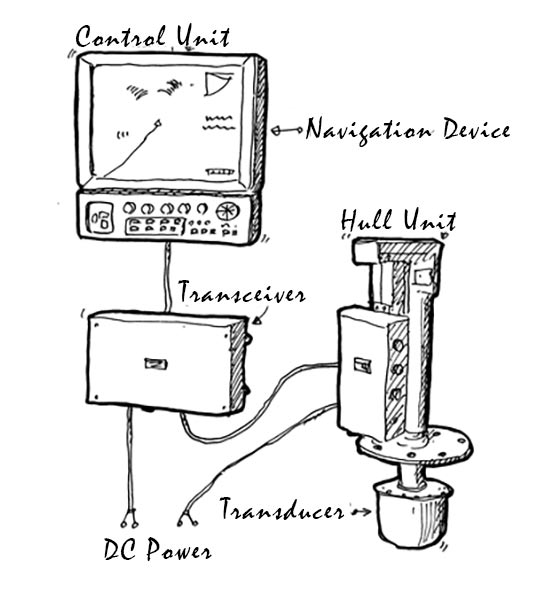
Standard Searchlight Sonar configuration
The image on the right shows the standard configuration of a Searchlight Sonar. This configuration consists of a monitor, control unit, transceiver, and the hull unit containing a transducer (the sensor).
The detection range is from 10 to 2400m (divided into 15-steps) and there are two types of Sonar: Single Frequency Sonar and Dual Frequency Sonar.
Single Frequency: 60/80/150/180/240 kHz,
Dual Frequency: 60/153 and 85/218 kHz
The hull unit, with a travel range of 25 to 40 cm, is installed at the bottom of the vessel. Generally, the longer the stroke (shaft length), the lesser the transducer is likely to be affected by surrounding air bubbles.
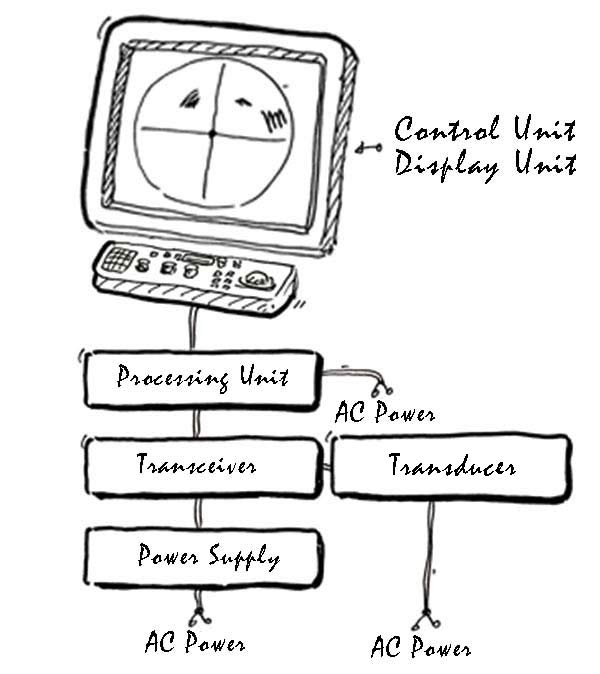
Scanning Sonar configuration
The image on the right shows the standard configuration of a Scanning Sonar. This configuration consists of a monitor, control unit, a processing unit, a transceiver, and the hull unit containing a transducer (the sensor).
The detection range depends on the frequency and output power, but the maximum horizontal range is 5000m.
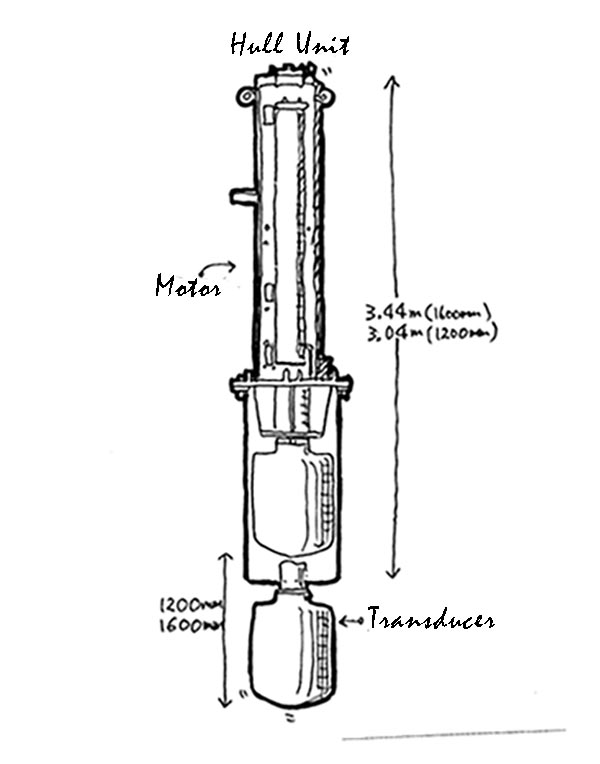
Hull Unit and Transducer
When the vessel is moving at high speed, objects drifting on the water can damage the transducer. Water resistance will also reduce the speed of the boat and increase fuel consumption. Therefore, it is recommended to retract the transducer when travelling at high speed and only lower it when searching for fish.
Once the transducer is lowered, it will be able to emit ultrasound.
The Hull unit design differs depending on the model, from 40/60cm for small configurations to 130/160cm for larger boats.
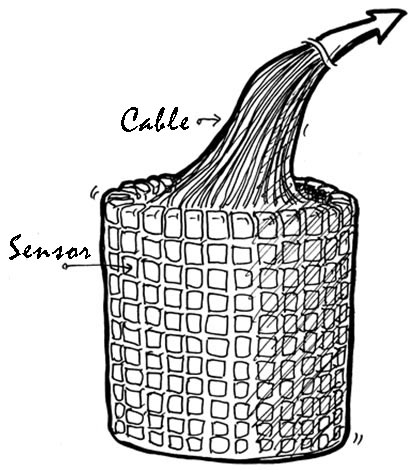
The transducer consists of approximately 1000 small sensors, arranged in a horizontal and vertical array to detect objects in all directions around the vessel. The transducer emits ultrasonic waves in all directions at the same time, and receives the returning echoes. Thanks to the number of small sensors, it is easy to determine the direction and the distance at which a school of fish is located with great accuracy.
The Scanning Sonar is controlled by a Timer cycle that sequentially switches the sensors to check the direction of any reflected signal.