Dual-band GNSS Receive Chip eRideOPUS 9
Model
ePV9000BWorld's best-in-class decimeter-level position accuracy of 20cm CEP using standalone method!
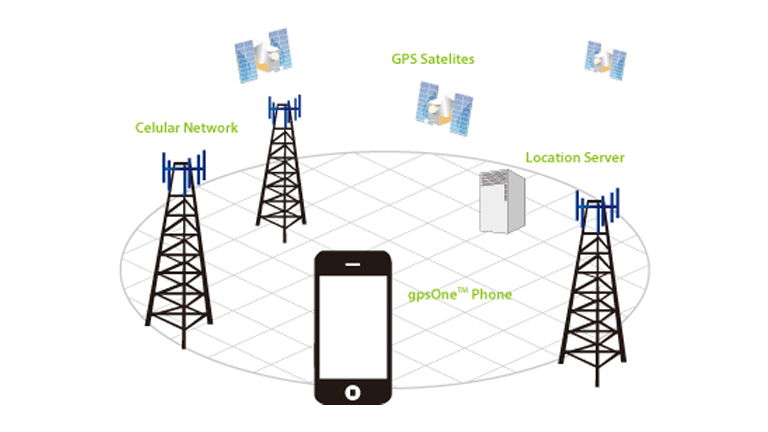
GPS stands for Global Positioning System by which anyone can always obtain the position and time information anywhere in the world.
GPS consists of the following three segments.
A number of GPS satellites are deployed on six orbits around the earth at the altitude of approximately 20,000 km (four GPS satellites per one orbit), and move around the earth at 12-hour-intervals.
Ground control stations play roles of monitoring, controlling and maintaining satellite orbit to make sure that the deviation of the satellites from the orbit as well as GPS timing are within the tolerance level.
User segment (GPS receivers)
Firstly, the signal of time is sent from a GPS satellite at a given point. Subsequently, the time difference between GPS time and the point of time clock which GPS receiver receives the time signal will be calculated to generate the distance from the receiver to the satellite. The same process will be done with three other available satellites. It is possible to calculate the position of the GPS receiver from distance from the GPS receiver to three satellites. However, the position generated by means of this method is not accurate, for there is an error in calculated distance between satellites and a GPS receiver, which arises from a time error on the clock incorporated into a GPS receiver. For a satellite, an atomic clock is incorporated to generate on-the-spot time information, but the time generated by clocks incorporated into GPS receivers is not as precise as the time generated by atomic clocks on satellites. Here, the fourth satellite comes to play its role: the distance from the fourth satellite to the receiver can be used to compute the position in relations to the position data generated by distance between three satellites and the receiver, hence reducing the margin of error in position accuracy.
The Fig 1-3 below illustrates an example of positioning by two dimensions (position acquisition by using two given points). We can compute where we are at by calculating distance from two given points, and at the same time calibrate with accurate time signal from satellites. The GPS is the system that can be illustrated by multiplying given points and replacing them with GPS satellites on this figure.
GPS satellites transmit multiple frequencies, such as L1 ( 1575.42MHz), L2 (1227.60MHz) and L5 (1176.45MHz). The typical signal sent out is the C/A code, which can be used for commercial purposes; the C/A code consists of a recognition code for each satellite, and information called a navigation message is sent at the same time. The data of the orbit of each satellite is called the ephemeris*, and the data of orbit of all satellite is called the almanac**. The navigation messages are broadcast at a rate of 50 bits per second. Utilizing this collection of data, GPS receiver calculates distance between satellites and the receiver in order to generate position data. In the Fig 1-4, the details of C/A code is described, and in the Fig 1-5, navigation messages are described.
L1 signal from the GPS satellites is phase-modulated in C/A code, which is the pseudorandom code. The pseudorandom code is also called pseudorandom noise code, which is known as a Gold code. As the Fig. 1-4 illustrates, C/A code is a sequence of digital signals “1” and “0”. In GPS, 1,023 consecutive patterns comprise a sequence, and subsequently, this sequence will continually repeat one after another.
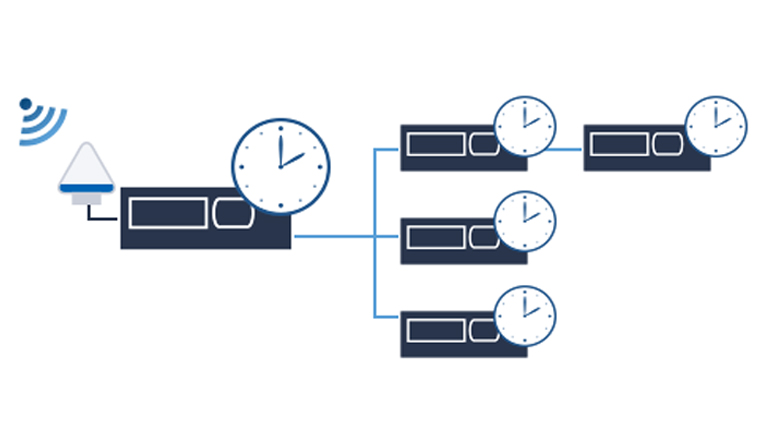
Navigation message consists of 25 frames, each of which includes 5 subframes of 300 bits each. The data length of 1 bit is 20 ms, and thus, the length of each subframe is 6 seconds, and each frame is a grouping of 1,500 bits of information with the frame length of 30 seconds. Since navigation message consists of 25 frames, this would add up to the message length of 12.5 minutes (30 seconds x 25=12.5 minutes). The GPS receiver requires 12.5 minutes to receive all the necessary set of data, necessary condition for positioning, when initial power activation takes place. The GPS receiver is capable of storing this set of data gained in the past internal backup battery, and it reads out the set of data when power reactivation takes place, hence instantaneously starting to receive GPS position.
The ionosphere is a portion of the upper atmosphere, between the thermosphere and the exosphere. When GPS signals pass through this layer, the propagation velocity of the GPS signal goes slower, hence causing propagation error.
The troposphere is the lowest portion of Earth's atmosphere. Radio reflections caused by dry atmosphere and water vapor within provoke GPS position error.
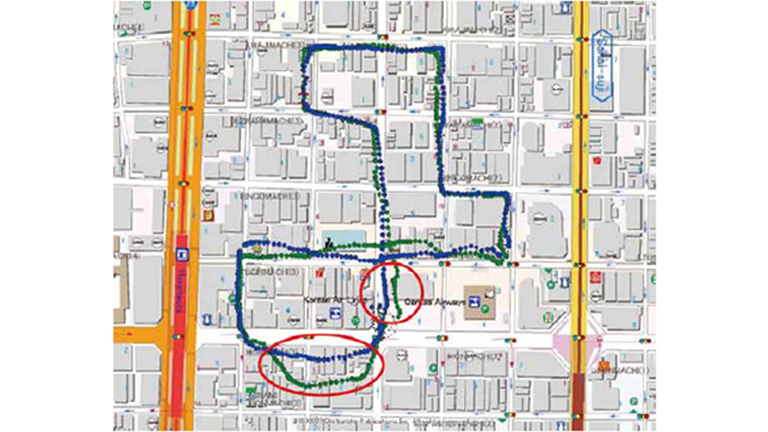
GPS signal is not immune to reflection when it hits on the ground, structures and many others. This phenomenon is called multipath propagation, one of the causes of GPS position errors.
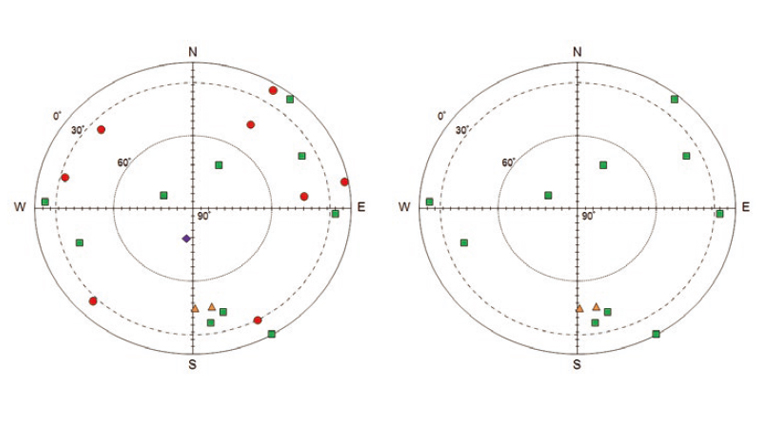
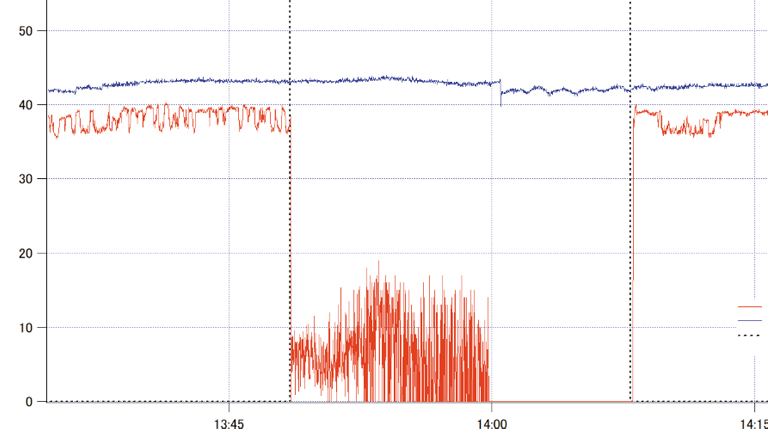
DOP is a value that shows the degree of degradation of the GPS positioning accuracy. The smaller the value is, the higher the positioning accuracy is. This value depends upon the positions of the GPS satellites tracked for positioning. If the tracked satellites spread evenly over the earth, the positioning accuracy would become higher, and if the positions of tracked satellites are disproportionate, the positioning accuracy would become lower.
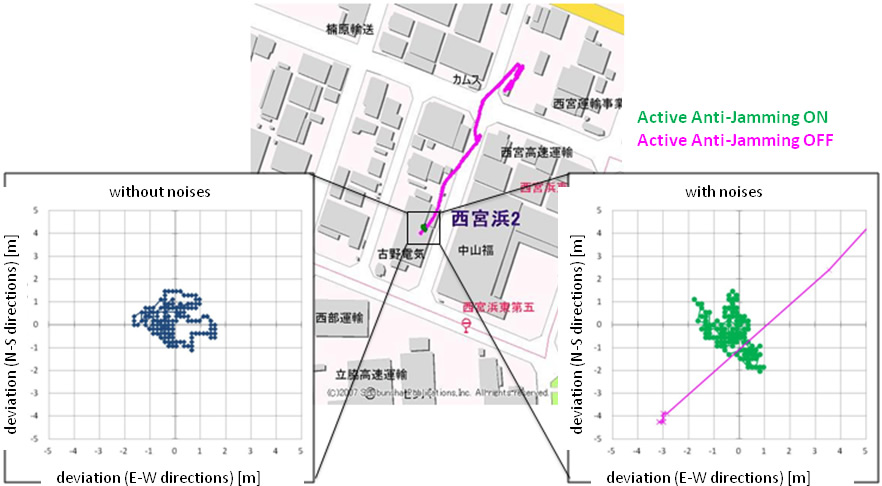
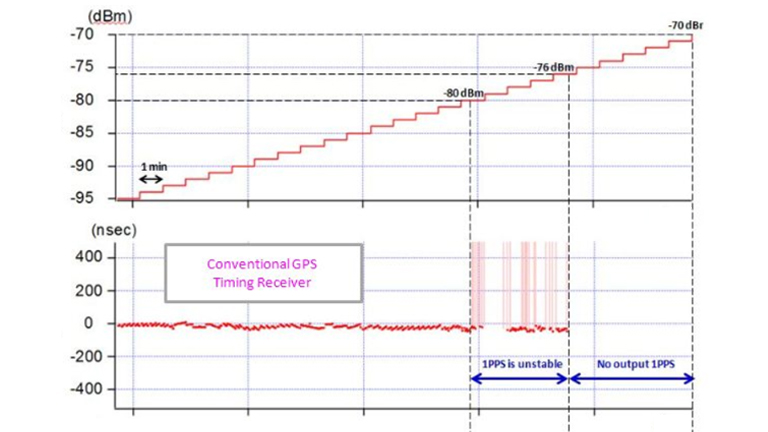
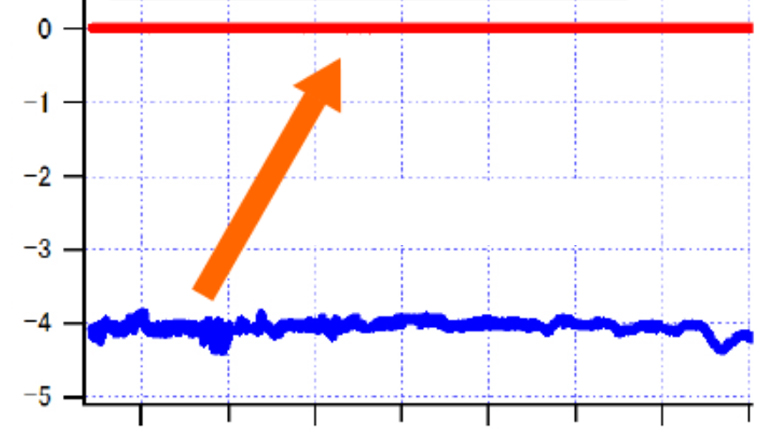
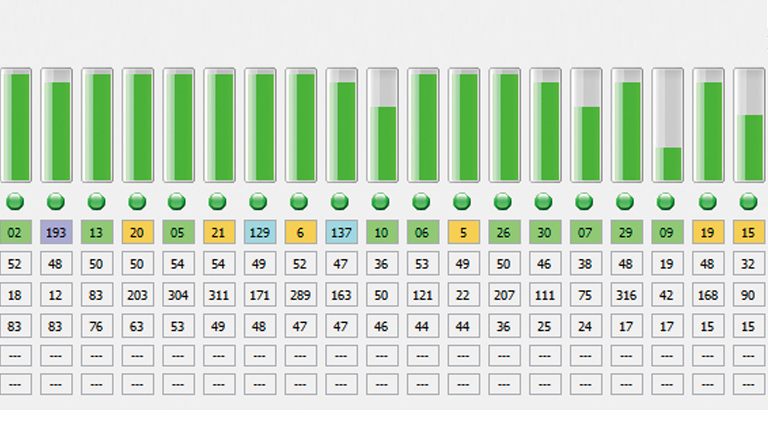
State of reception of GPS depends upon the strength of GPS signals. The greater the signal strength is, the more stable the reception status is. Whereas the reception status would become unstable when the GPS signal became weaker, due to obstacles or noise sources in the vicinity of a GPS receiver.
State of reception of GPS depends upon the number of satellites tracked for positioning.
If the number of the tracked satellites is great, GPS positioning becomes greater, but if there were a fewer satellites tracked for positioning, it would be difficult to generate GPS position. The Fig. 1-11 illustrates the occasion where the GPS receiver tracks a greater number of satellites for positioning. The Fig. 1-12 illustrates the occasion where the GPS receiver tracks only a few number of satellites for positioning.