The Observation Network Created by the Earthquake Proves Useful for Accurate Timekeeping (Part Two of Two) - A Solution to the "Mr. Higgins Problem" in Space -

Nov 1, 2023
When people work together as a team, it's necessary for them to synchronize their actions—in other words, to make sure their timing matches up.
In one famous television drama based out of a hospital in the great city of Chicago, doctors use the phrase "On my count: one, two, three!" to coordinate the action with medical staff when transferring a patient from a stretcher to a bed, with "three" being the correct timing for lifting up the patient. The shared understanding of this method together with nurses and paramedics facilitates quick and precise movements, and also adds an extra layer of tension to the show.
Now, imagine you're a choir director: when initiating a piece in four-four time, you might tell your singers to start with an initial count-off of "one, two, three, start!" Failure to do this during rehearsals may result in some members flubbing the start timing during an actual performance.
In Japan, people use rhythmic phrases such as i-sei-no-se (Eastern Japan) and san-no-ga-hai (certain parts of Kyushu) when timing the lifting of heavy objects—regional variants can differ greatly. There are also variants among different generations, job types, industries, and even individual workplaces. It's likely that these differing versions were born through trial-and-error at individual worksites, ultimately leading to an established approach based on member knowledge and approaches. In other words, such phrases represent the history of each individual group. Traditional exclamations such as wasshoi, soiya and rasseraa heard at Japanese festivals are similar in their primitive constructs and usage in timing actions. In a way, they are much like the methods used for time synchronization in clocks.
When people come together to accomplish a task in the same space, it doesn't make a difference whether the timing method varies from worksite to worksite. However, if a member of one worksite travels to different, distant worksite and tries to accomplish something together with the people there, it becomes necessary to teach them local rules used in advance—to synchronize the "clock," speaking figuratively.
In Japan, dialing 117 from a phone—either a smartphone or a landline—will connect you with a current-time notification service. If you do this exactly on the minute or the thirty-second mark, the spoken time notification will be accompanied by three preemptive tones followed by a sustained tone. Although this may seem like nothing special, it's important to note that the message doesn't notify the listener of the time after these beeps and tones; rather, it's common practice to deliver a spoken notification of the time first, followed by the beeps and tone. This is something people everywhere have come to expect, and we make use of it in various industries and fields.

I used my computer to record the audio from a time notification message provided by the Nippon Telegraph and Telephone Corporation (NTT), and added some comments to the waveform graph. By the way, NTT utilizes 500- and 1000-hertz beep/tone sounds, whereas the Japan Broadcasting Corporation (NHK) utilizes 440- and 880-hertz beep/tone sounds. Also, NHK's notification sequence begins with a piano.
In GNSS applications, this exact same method is used to convey the time. The first-ever GNSS was the American GPS, whose standard signal specifications have been made publicly available. Signals sent by satellites through this system are referred to as "navigation messages"; let's take a look at the general framework behind these messages.
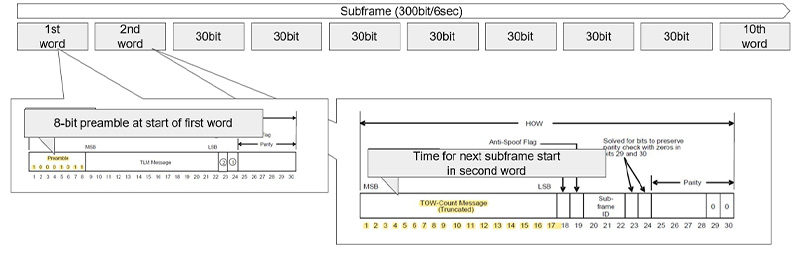
Basic GPS navigation message structure (for an L1C/A signal). Diagram created based on the IS-GPS-200M Interface Specifications (source: https://gps.gov).
A navigation message includes a binary of 0 or 1, and the transmission speed is a slow 50 bits per second.
The smallest data classification unit is 30 bits and referred to as one "word." Ten words comprise the next-largest unit, a "subframe." Because 1 subframe is made of 10 words, its length is 300 bits, and transmitting that subframe to completion takes 6 seconds.
Let's compare this framework to a passenger train: one word would be equivalent to 1 train car with 30 seats, and 1 subframe would be a complete train comprising 10 cars.
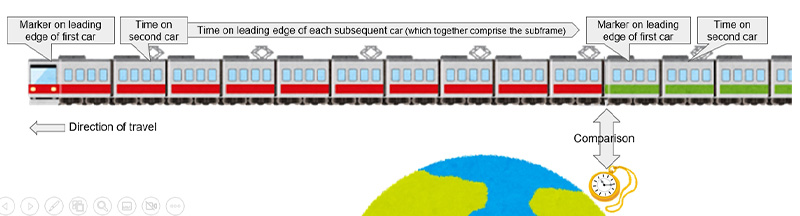
This diagram depicts a navigation message in the form of a train (created by the author using illustration and materials from Irasutoya ). When dialing 117, time notification sounds are emitted roughly 4 seconds after the announcement concludes, which is the same length as the roughly 4-second GPS navigation message.
On car number two (the second word), a time is marked to indicate the departure time from the station (transmission time from satellite) for the subsequent train cars (overall subframe). Unlike a real-life train, however, our navigation-message train features continuously interconnected transmission elements (as if the train cars are stuck tightly together at their ends), with an 8-bit preamble serving as a marker to show separation at the leading edge of the first car (start of the first word). For GPS (L1C/A signals), the established format is "1000 1011," which is equivalent to the sounds heard in a 117 system notification.
Inside a GNSS receiver, the time read from the second train car is compared with the receiver clock's time as the leading edge of the first car passes by in order to determine the time disparity.
This disparity, which represents the time taken for the signal to travel from the satellite to the receiver, is an important piece of the puzzle in GNSS-based positioning operations.
Let's review the mechanism behind GNSS positioning. As prerequisites for this system, the GNSS satellite must have an extremely accurate clock, and the ground-based receiving party must have a highly accurate clock, for keeping the time. The process proceeds as follows:
Once the receiving party's position has been determined, the process can be carried out in reverse, as follows:
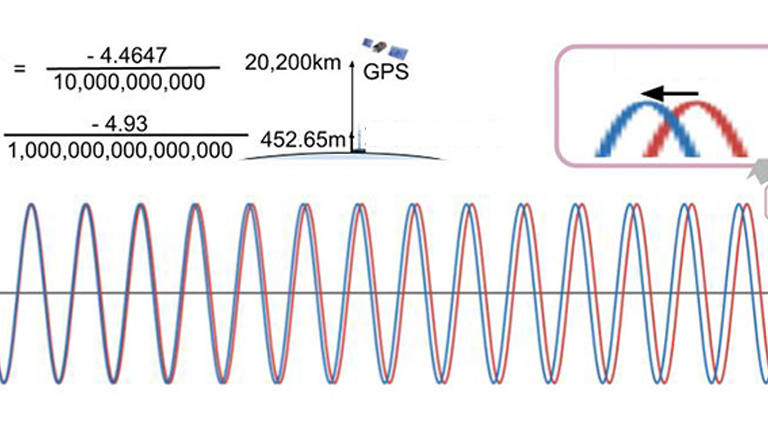
A. The receiving party's distance to the satellite is understood based on the receiving party's position and the trajectory information (the reverse of step 3 above).
B. Once the distance is understood, the speed of light can be factored out of the equation to determine the time required for navigation message arrival (the reverse of step 2 above).
C. The time required for message arrival can be subtracted from the ground-based time in order to determine the time on the satellite's atomic clock (the reverse of step 1 in the original process above).
As long as this is carried out from a stationary, unchanging position, step 4 from the first process above does not need to be carried out.
The above enables confirmation based on the extremely precise time kept by each satellite's onboard clock, and thus maintenance of highly precise time on the ground. In other words, it is possible to share accurate time information between the ground-based receiving party and the GNSS satellites, which are separated by tens of thousands of kilometers. Ultimately, the basis of this entire approach is step 2 in the original process—determination of the time difference—which necessitates reliable GNSS time synchronization technology.
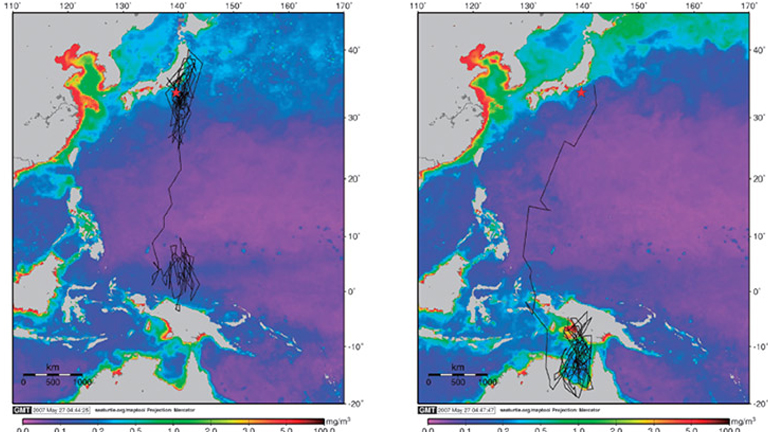
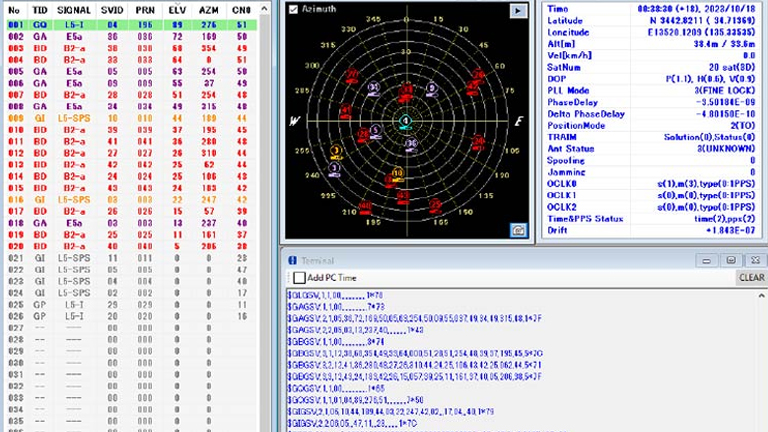
In this way, numerous receiving parties on the ground who have synchronized their clocks with the GNSS can share accurate time information with one another—even if they are at separate locations—and work together based on that timing. One of the most well-known applications of this is the seismic observation network system. In my next article, I will explore the relationship between seismic observation and time synchronization, which represent an important application dating back to the early years of GPS technology, based on my discussion with an expert in that field.
Born in Ishikawa Prefecture in 1964. Based on his experience in covering industrial technology, cutting-edge technology, and space development, he is passionate about unraveling and conveying difficult topics in an interesting way to people of all ages, from children to senior citizens. From 2009 to 2014, he was a member of the editorial board of "JAXA's," the official magazine of the Japan Aerospace Exploration Agency. Author and co-author of the following books: 『あなたにもミエル化? ~世間のなりたちを工学の視点から~』(幻冬舎mc)、『私たちの「はやぶさ」その時管制室で、彼らは何を思い、どう動いたか』(毎日新聞社)、『東京大学第二工学部70周年記念誌 工学の曙を支えた技術者達』(東京大学生産技術研究所) etc.,


_1.jpg)
_1.jpg)
_1.jpg)
_1.jpg)
_1.jpg)