デュアルバンドGNSS受信チップ eRideOPUS 9
型式
ePV9000B業界最高クラス!スタンドアローンで位置精度50cmを実現
車車間通信および路車間通信は、交通の安全、事故防止を目的として国土交通省など産学官連携のもとに研究・開発が進められている「安全運転支援」のための通信技術です。本システムでは、見通しの悪い交差点などにおいて、出会い頭の事故や右折事故、左折事故等の防止を目指しております。
また、事故防止だけでなく、自車が向かう先の道路情報を対向車や路側機から得るなど、渋滞緩和に利用する方法も検討されています。
日本ではこれら取り組みに向けてITS Connect推進協議会が設立され、運転支援システム「ITS Connect (ITSコネクト)」の基盤技術の検討や運用支援が進められております。

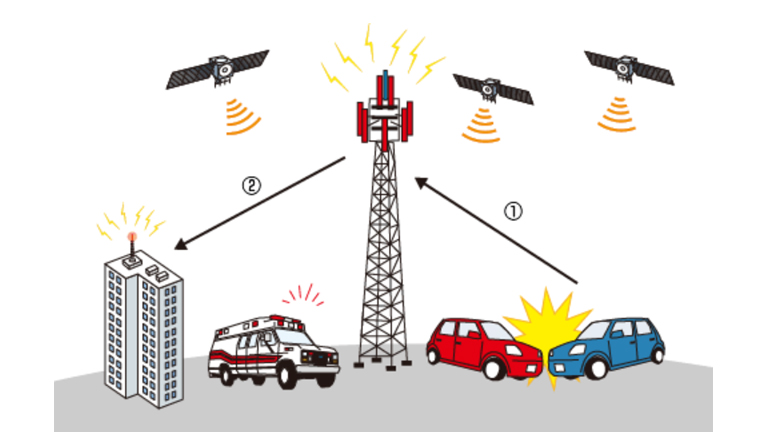
見通しの悪い交差点において、車同士がお互いの位置や速度といった自車情報を無線で送受信し、もしも出会い頭衝突の危険性がある場合、運転者に警告して衝突事故を防ぎます。

車は自車情報を路側機に送信します(イラスト内A)。路側機は周辺状況を把握して周囲を走る別の車に情報を送信し(イラスト内B)、運転者に注意喚起することで衝突事故を防ぎます。

また、センサーやカメラが搭載された路側機では、路側機自身が車や横断歩道の歩行者の有無を調べ、周辺の車に送信することでも事故防止につなげることができます。この場合、自車に通信システムが搭載してあれば、周囲の車や人が通信システムを持っていなくても周辺環境の把握が可能です。
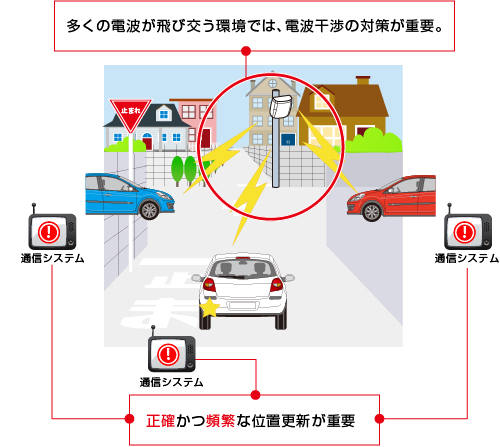
車車間通信/路車間通信において重要なことは、自車の位置を正確かつ頻繁に更新し、発信することです。誤った位置の発信や位置更新の遅れが生じると、事故の防止に役立てることができなくなります。
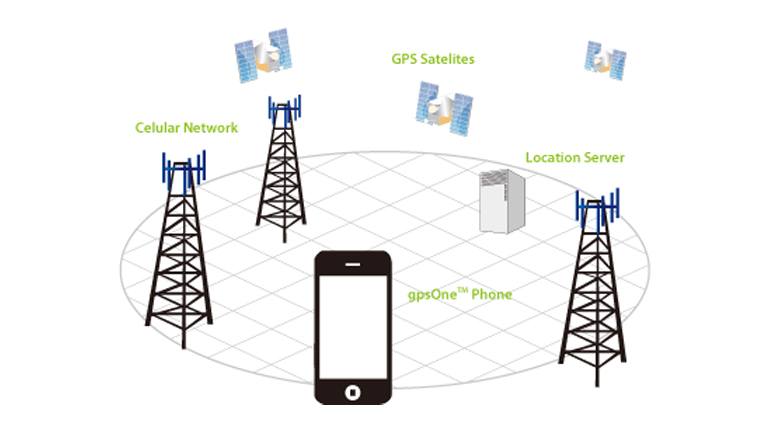
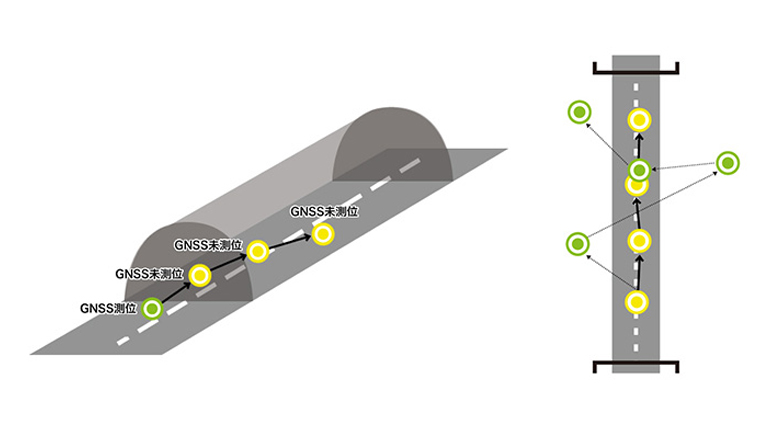
正確な位置を把握するためには、デッドレコニング技術(Dead Reckoning / 自律航法)が有効です。デッドレコニング技術(Dead Reckoning / 自律航法)では、GPS(GNSS)衛星だけでなく、車速やジャイロといった各種センサーの情報も合わせることで、より正確な位置を提供します。また、ビル街など見通しの悪いエリアでは、衛星信号が弱く、衛星単独での測位が難しい状況が多くあります。この状況下でもセンサーのみで位置更新が行えるデッドレコニング技術(Dead Reckoning / 自律航法)が有効です。
位置を頻繁に更新することに関しては、高レート測位(例えば、1秒間に10回の位置更新=10Hz測位)が役立ちます。従来の1Hz測位(1秒間に1回の位置更新)と比べて、高速で移動する車の位置をリアルタイムに捉えることができます。
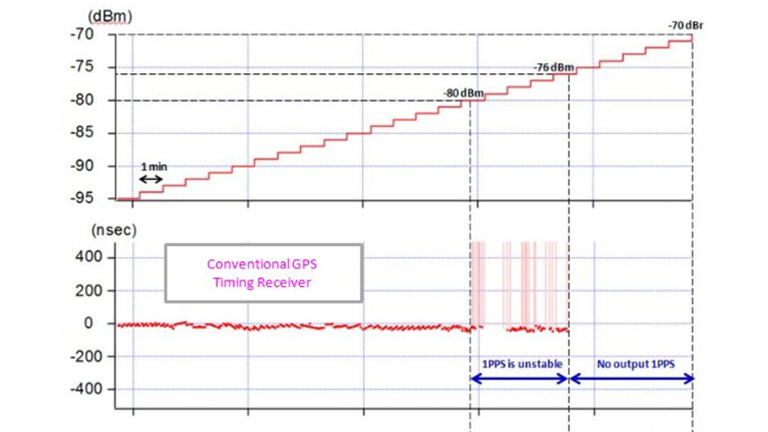
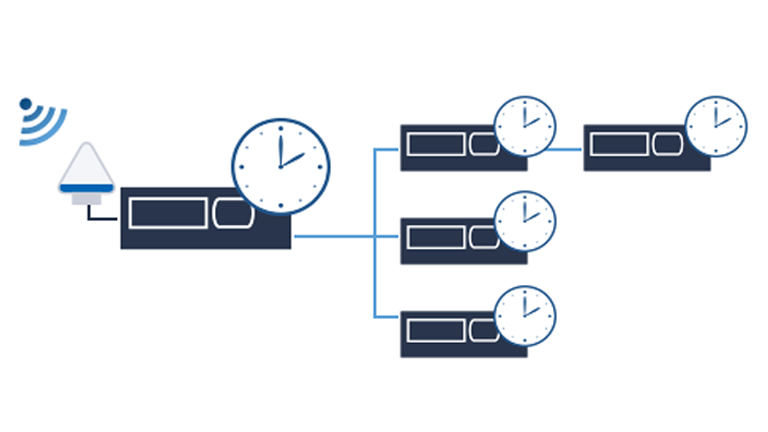
車車間通信/路車間通信では、同一エリア内に多くの電波が飛び交い、また、それが同一の周波数帯になるため、電波干渉への対策が重要視されています。有効な対策として、それぞれの通信機が共通の時刻を持ち、時刻同期や時刻管理によって電波を飛ばす時間帯が重ならないようにする「時分割多重方式」が考えられます。一般に、共通の時刻には世界標準時のUTC時刻が用いられます。時刻用・タイミング用のGPS(GNSS)受信機は、正確なUTC時刻と、その正1秒に同期した1PPS(1秒パルス)を得ることができ、時刻同期・時刻管理システムの構築に適しています。