レーダーの基礎知識
レーダーの仕組み
レーダーって何?
レーダー(Radio Detecting and Ranging)は自ら電波を発射し、その反射波をとらえることにより、海上の他船やブイ、鳥などの物標をとらえることができます。波長の短いマイクロ波を使用するため、キャッチした物標までの距離と方位を正確に測定することができます。
現用レーダーには船舶用の他、気象レーダー、航空機管制用のレーダーなどがあります。
この他、自動車のスピード取締り用や野球でのスピードガンもレーダーの一種です。
原理は山びこと同じ
レーダーは音波ではなく波長が極めて短いマイクロ波が使用されていますが、原理は山びこと同じです。
マイクロ波によるエコーをキャッチすることにより物標までの距離と方位を測り、その様子を映像としてディスプレイに表示します。
今、マイクロ波を一方向へ発射したとします。電波は一直線上を進みますが、その進行線上に他船や島などの物標があれば電波はそれらによって反射され、反射波の一部は元の位置まで返ってきます。従って、電波を発射してからその反射波が返ってくるまでの所要時間を測定し、距離に換算することにより、それぞれの物標までの正確な距離を知ることができるのです。
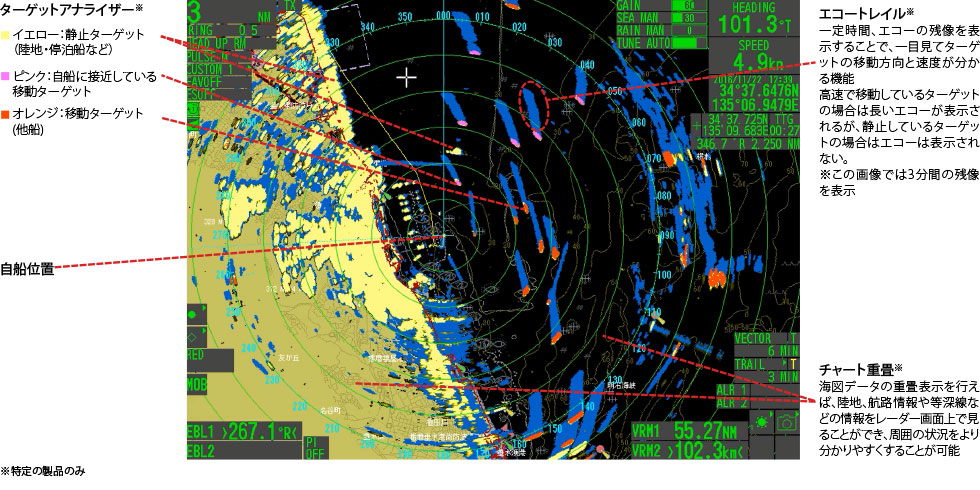
一部の船舶用レーダーでは、エコーを分析し、移動、接近、静止などに応じて色分けを行う”ターゲットアナライザー”や、ターゲットの移動状況をより分かりやすく表示する”エコートレイル”などの機能が搭載されています。
船舶用レーダーの映像例
対象までの距離は?
もちろん電波は往復しているので、レーダー機器から物標までの距離Dは測定した電波の往復時間Tの片道分となります。
D = 1/2 × cT
D: レーダーから物標までの距離
c: 電波の速さで 3 × 108 m/s
T: マイクロ波を発射してから反射波を受信するまでの時間
電波は1秒間に30万kmも進むので、電波を媒体とするレーダーは、瞬時に多くの情報処理ができるという大きなメリットがあります。
パルス波について
レーダーではマイクロ波を小刻みに発射しますが、このような信号をパルス波(矩形波)といいます。パルス波を用いるのは、物標までの距離を正確に測るためであり、また1つのアンテナで送信と受信の動作を交互に切り替えるためです。
レーダーではパルス波を一定の周期で繰り返して送信します。パルスの幅や繰り返し周期は探知したい距離によって決まります。例えばパルス幅が0.8μ秒、パルス繰り返し周波数が840Hzとした場合、これは0.8μ秒幅のパルスを、1秒間に840回も送信と受信を繰り返していることになります。
指向性を持つアンテナユニット
物標までの距離は、反射波が返ってくるまでの時間を測ればよいのですが、その方向は指向性のあるアンテナを使うことにより知ることができます。船舶用のレーダーには全周を回転するアンテナを用いますが、その指向特性は極めてシャープに設計されています。物標からの反射信号はアンテナでキャッチされますが、受信信号はたいへん微弱なものです。このため専用アンプで十分増幅した後、ビデオ検波し、ディスプレイで映像として表示するようになっています。
レーダーの見通し距離について
レーダー電波は地表を伝わっていきますが、ごくわずかにわん曲伝搬する性質を持っています。この伝搬特性は大気の密度によって少し変わりますが、通常の伝搬では光学的見通し距離に比べて、大体6%ほど長くなるとされています。
このレーダーによる見通し距離Dは次のように表されます。
D ≒ 2.2(√H1 + √H2)
D: レーダーによる見通し距離(マイル)
H1: 船上のレーダーアンテナの設置高(m)
H2: 他船等の物標高(m)
例えば、自船のアンテナの高さが16mであり、物標の高さが9mであったとすれば、レーダー見通し距離は大体15マイルとなります。レーダーではアンテナを高い位置に設置することが、探知距離をのばすことになり、また物標が高いほど遠くからキャッチできるということになります。
レーダーの構成
- ここでは最新のマグネトロンレーダーを例に、レーダーの構成を紹介します。
レーダーの構成要素
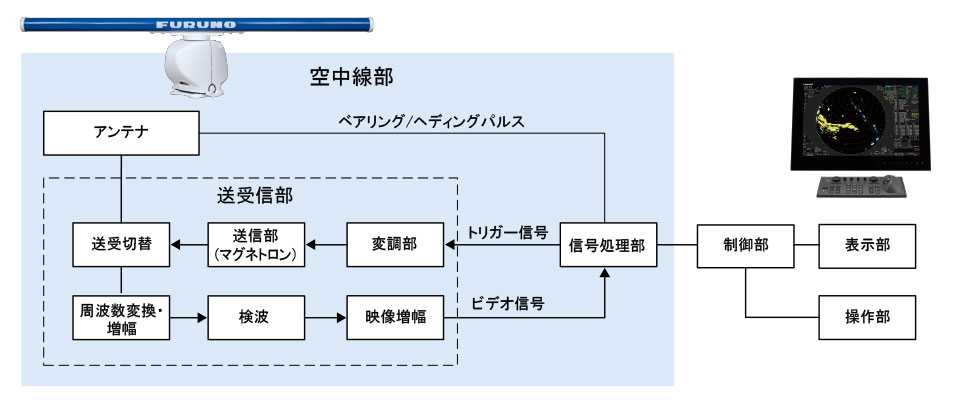
レーダーの装置全体は、主に以下のようなブロックで構成されています。
- 空中線部(アンテナ・モーター部):電波を輻射するアンテナと、アンテナを回転させるモーター部で構成
- 送受信部:電波を生成、または受信し信号処理を行う
- 制御部:レーダーの各ブロックや外部機器の信号を制御
- 表示部:レーダー映像や接続された各種センサーの情報を表示
- 操作部:レーダーの各種操作を行う
実際の製品では、これらのブロックが装備性等を考慮した最適な組み合わせでいくつかのユニットにまとめられています。
レーダーの基本動作
電波が送信されてから、ディスプレイに表示するまでに行われる各ユニットの動作は下記のようになります。
- まず、信号処理部からのトリガー信号を元に、送受信部の変調部で作られたパルス電圧でマグネトロンを制御し、強力なマイクロ波を発生させます。マイクロ波は導波管という特殊なパイプを伝ってアンテナまで送られ、アンテナの輻射面から一定方向へ発射されます。
- 発射されたマイクロ波は海面上をまっすぐに進行します。途中、マイクロ波は物標にあたり、その一部分が反射波として元のアンテナまで返ってきます。
- アンテナで受信されたマイクロ波は、周波数変換、信号の増幅、ビデオ検波などの各回路を通過し、ビデオ増幅された後、アンテナ部内で信号処理を行い、デジタル信号として制御部に送り込まれます。
- 制御部に送り込まれたレーダーの信号は、接続された他の航海計器の情報とともに、ディスプレイに表示するための映像に変換され、ユーザーにとって見やすい形でディスプレイ上に表示されます。
”目”としての役割、レーダーのアンテナ
レーダー用のアンテナは、電波を発射したり、反射して返ってきた微弱な信号を受信するためのユニットです。アンテナで重要なことは、物標の方位を正確に把握するために、一定方向へ集中して電波を発射する必要があるということです、つまり電波の指向特性が重要になってくるのです。
上のアンテナはスロット型アンテナと言われるもの。
送受信部で作られたマイクロ波は導波管を伝ってアンテナまで送り込まれ、アンテナ内部の導波管にある切り込み(スロット)部分から発射されます。
このスロットはアンテナ内部の導波管前面に設けられており、スロットの位置は半波長間隔で傾斜しています。また、スロットの角度はすべて微妙に異なっています。これらのスロットから発射された電波が空中で合成されることにより、一定方向にシャープな指向角を持った電波が送信されるという仕組みになっています。
このスロットの数により水平方位特性が変わってきます。つまり長いアンテナにすることによりスロット数も多くなり、より優れた水平方位特性が得られるという特徴があります。
マイクロ波について
レーダーに使うマイクロ波は波長が極めて短いために、光のように直進すると考えてよいでしょう。30MHz以下の電波のように電離層によって反射することもないので、直視距離内での伝搬と見てよいのです。ただ光のように雲や霧などに吸収されたり、減衰したりすることが少ないので、航海用レーダーには最適な周波数帯だといえます。
船舶用レーダーには主に2つの周波数帯が使用されています。3,000MHz帯を使用するSバンド、9,000MHz帯を使用するXバンドです。
IEEEのマイクロ波の周波数による分類
帯域(GHz) | 名称 | 用途 |
|---|---|---|
0.2~0.25 | Gバンド | 軍用航空無線 |
0.25~0.5 | Pバンド | 移動体通信 |
0.5~1.5 | Lバンド | テレビ放送・携帯電話・インマルサット衛星電話 |
2~4 | Sバンド | 固定無線・移動体向けデジタル衛星放送・ISMバンド(電子レンジ・無線LAN・アチュア無線など) |
4~8 | Cバンド | 通信衛星・固定無線・無線アクセス |
8~12 | Xバンド | 軍事通信・気象衛星・地球観測衛星 |
12~18 | Kuバンド | 衛星テレビ放送・通信衛星 |
18~26 | Kバンド | 通信衛星 |
26~40 | Kaバンド | 通信衛星 |
40~75 | Vバンド | レーダー・通信衛星 |
75~111 | Wバンド | 電波天文学 |
様々なレーダーのアンテナ

Xバンドの波長は短いのですが、波長が短いほど電波の直進性が強く、指向性のある電波を発射できるとともに、物標からの反射波をとらえやすくなります。
また波長が短いほど利得の大きい、効率のよいアンテナを作ることができるのです。もちろんアンテナそのものや導波管の太さなど、全てのユニットが小さくてすむので経済的であり、小型化、軽量化が容易です。 このように、Xバンドレーダーは多くの活用メリットを持っています。
しかし、Sバンドレーダーなどは波長が長いことや、電波の減衰が少ない上に、より遠くの物標をとらえるのに都合がよく、また海面反射が少ないのも特長であり、用途や目的によっては、Xバンドレーダーと併設して使用します。我々がもっともよく使用するのはXバンドレーダーであり、この電波の波長はわずか3cmです。Sバンドでは10cmになります。
レーダー用語解説
方位分解能
自船からみて同一距離にある方位の異なる2つの物標が識別できる最小方位差をいいます。アンテナの水平ビーム幅によって決まってくるので、ビーム幅の狭いシャープな特性のアンテナをもつレーダーほど方位分解能は良いということになります。
方位分解能を向上させるには、アンテナの水平ビーム幅を狭くすればよいのですが、このためにはアンテナの水平長を長くしなければなりません。ちなみに、Xバンドレーダーで、水平300cmという長いアンテナがありますが、この場合の水平ビーム幅は0.75度ときわめてシャープです。また、逆にビーム幅が広いレドームタイプのアンテナでは、水平長40cmという超小型のものがありますが、この場合の水平ビーム幅は5.7度と広くなっています。
水平ビーム幅と垂直ビーム幅
水平ビーム幅も垂直ビーム幅も、レーダーアンテナの特性を示します。水平ビーム幅は前述のようにアンテナの水平長により大きく異なりますが、垂直ビーム幅は一定の幅に設定されています。垂直ビーム幅はピッチングやローリングにより、レーダー探知に大きく影響を受けない角度としてあり、大体20-25度の範囲です。
距離分解能
自船から同一方向にある距離の異なる物標を、画面で2つの物標として識別することができる2物標間の最小距離のことです。
距離分解能は送信パルス幅によって大きく左右されます。すなわち、送信パルス幅が短いときはパワーそのものは小さいが距離分解能が良く、逆にパルス幅が長くなると探知パワーは大きくなるが分解能が悪くなってしまいます。
パルス幅はこのように距離分解能と探知能力に影響するので、探知レンジに応じて自動的に切り換わるようになっています。小型レーダーでは3種類くらい、大型レーダーでは4-6種類くらいあります。
パルス幅
レーダー電波は連続波ではなく、パルス波を使って効率のよい探知動作を行っています。パルスは瞬間的な信号ですが、時間幅があります。近距離レンジの場合は、0.08マイクロ秒、中距離で0.6マイクロ秒、遠距離で1.2マイクロ秒くらいが使われています。
近距離レンジでは、パワーが弱くても探知できるため分解能のよいショートパルスが、遠距離レンジではパワーを上げるためにロングパルスとなります。ただ、リバーレーダーのように全体的に近距離レンジで高分解能特性を期待する場合はパルス幅も短く設定されています。
パルス繰り返し周波数
パルス繰り返し周波数は、1秒間に発射する送信パルスの数のこと。単位はHz、またはPPSです。
VRM (可変距離環)
VRM (Variable Range Marker)のことで、物標までの正確な距離を測定するために使用します。
EBL (電子カーソル)
EBL (Electronic Bearing Line) のことで、物標の方位を測定するために使用します。
TT(Target Tracking)
TT (Target Tracking) は自動衝突予防を援助する、ターゲットを自動追尾する機能のことです。他船の動きを詳細に分析でき、レーダー信号で一定時間、船の動きを捕捉することにより、他船がどちらの方向へ、どれくらいの速さで航行しているのかを計算します。レーダー画面上ではこれらのターゲット情報を数値とベクトルで表示します。ベクトル表示ではターゲットの動いている方向に一本線が伸び、その長さはターゲット自身のスピードを表します。
TT機能ではCPAやTCPA計算も行います。CPAは他船と自船がもっとも接近した際の2船間の距離のことで、TCPAは最接近時までの時間を表します。CPAは捕捉したどのターゲットに対しても計算できるので、衝突の危険性のある物標がある場合に計算させたりします。CPAがあまりにも短いと危険船であると判断でき、回避のための転舵が必要となります。