GNSS(時刻同期・車載/産業) 技術
Dead Reckoning(DR/デッドレコニング/自律航法)とは
- 車載/産業
Dead Reckoning(DR/デッドレコニング/自律航法)とは
GPS(GNSS)による測位は、3つ、ないしは4つ以上のGPS(GNSS)衛星からの信号を受けて初めて高精度に測位できます。
GPS(GNSS)単独の測位では、高層ビル街など遮蔽物の多い場所や、地下やトンネルでの走行などでは衛星からの信号が途切れるため、測位が不安定になったり、不可能になったりします。
そこで、ジャイロセンサーや加速度センサーなど、各種センサーからの情報と合わせて演算処理することにより、GPS(GNSS)単独では測位を続けることが難しい環境下でも、高い精度で測位できる技術がデッドレコニング(Dead Reckoning /自律航法)です。カーナビゲーションシステムでも多く活用されております。
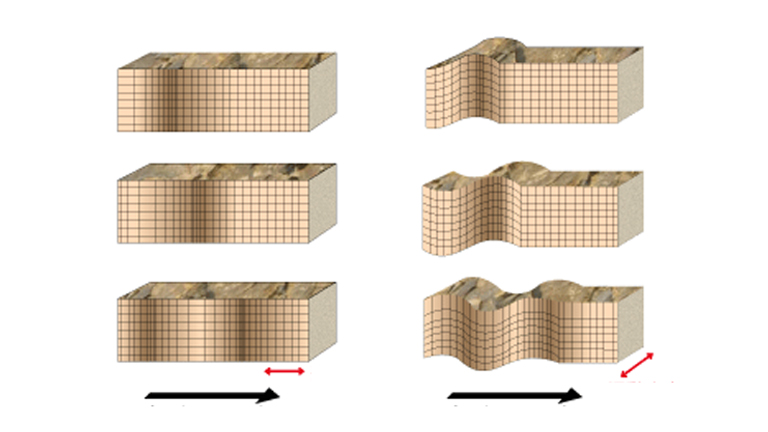
トンネル、アーバンキャニオンでも高精度な測位を継続
フルノのデッドレコニング対応受信機は、ジャイロセンサー、加速度センサー、車速パルス、車輪速データなどを組み合わせて使用します。使用方法は推奨のジャイロセンサーと加速度センサーをI2C端子に接続するだけです。また車速パルスについても同様、車速パルス端子に接続するだけで使用できます。各種センサーと車速パルスの補正は、GPS(GNSS)衛星からの信号をリファレンスとし、受信機内部で自動的に行われます。
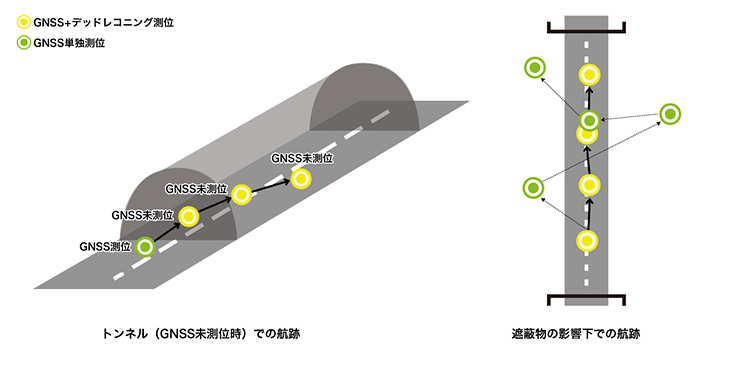
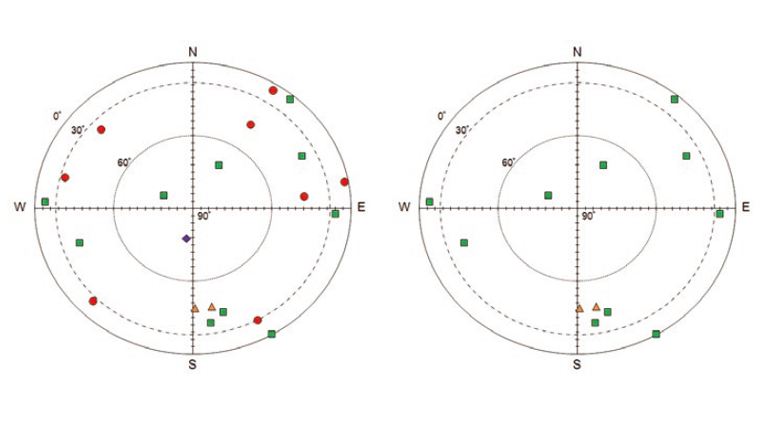
また、フルノのデッドレコニング対応受信機は、トンネルはもちろん、GNSS信号が受信できる場合でもGNSS+デッドレコニングを組み合わせて測位をおこないます。これにより、従来のGNSS単独測位の受信機が苦手とするアーバンキャニオン(高層ビルが立ち並んで谷間のようになった一帯)でも超高精度の位置測位を実現します。
デッドレコニングを活用した場合
(トンネル内でも測位を継続)
GNSS単独測位の場合
(トンネル内では測位が中断)
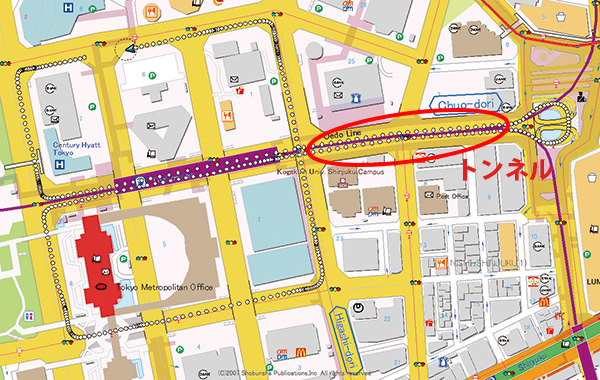
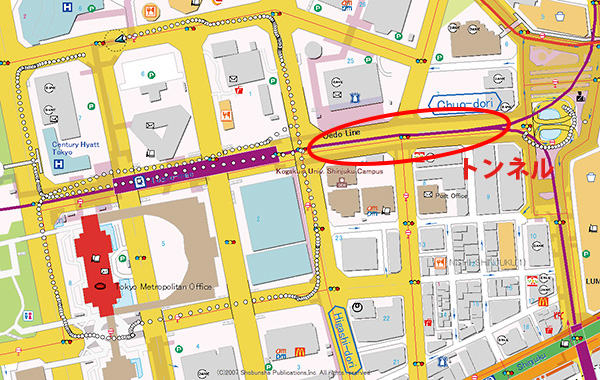
マルチGNSS+デッドレコニング : 新宿のアーバンキャニオンで実現する位置精度2.5m(1σ)
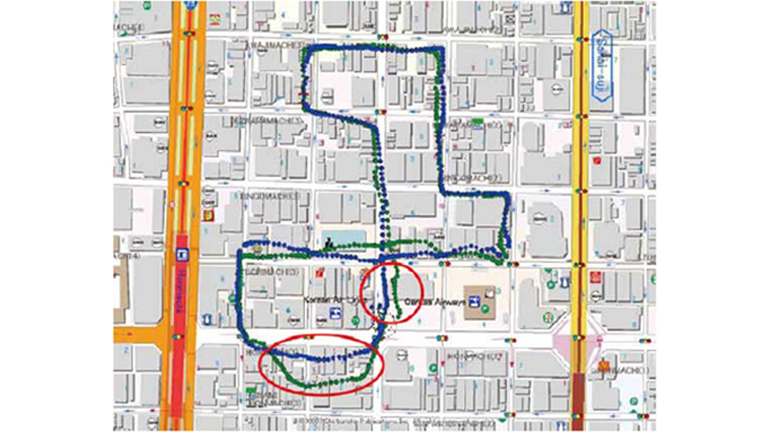
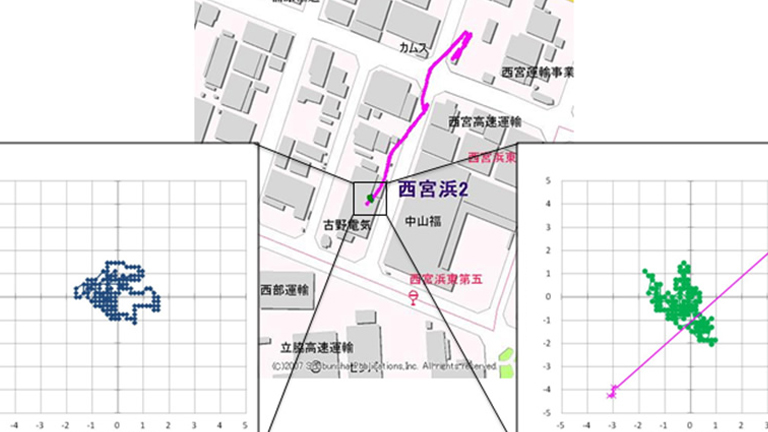
フルノの開発チームはデッドレコニングの性能を磨くため、東京新宿・都庁周辺に独自のテストコースを設定しました。衛星からの信号を反射する高層ビル群の谷間や、ときには信号がまったく受信できなくなるトンネルを走る過酷な環境です。
従来のGPS受信機では航跡がふらつき、道路から外れ、最大で50メートルの位置誤差が出る状況において、デッドレコニング対応受信機GV-87は、道路から外れることなくテストコースを走行し、位置精度2.5m(1σ)を達成しました。
フルノが従来から持つGNSS受信機のための信号追尾技術と測位演算技術、そこにジャイロと加速度のセンサーを高い技術で融合し、自動車の位置を高精度に検出する新しいGVシリーズが生まれました。
GV-87は、GPSとGLONASSのマルチGNSS受信と高精度なデッドレコニング機能をあわせ持つ、フルノの車載用GNSS受信機の中で最高の性能を実現した製品です。
自車位置精度はマップマッチングをせずとも、メーカー純正カーナビゲーションシステムと同等以上です。
動態管理や運行管理などの業務用車載端末、ドライブレコーダー、バスロケーションシステム、緊急車両用ナビなど、これまで位置精度に不満のあった車載機器に対して、容易にカーナビと同等の位置を提供します。また将来は車車間通信やADASなどの事故防止・安全運転機能への貢献を目指しています。
新宿テストコース
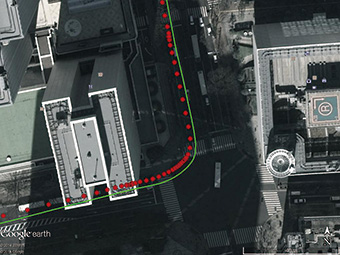
[GV-87] 位置誤差:2.5m(1σ)
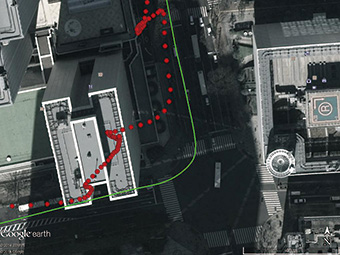
[GPS受信機]位置誤差:10m(1σ)
©Google
●GV-87、GPS受信機で測位した航跡
●実際に走行した航跡
技術一覧
GPSとは
マルチGNSS(多周波GNSS)技術
耐マルチパス機能
アンチジャミング
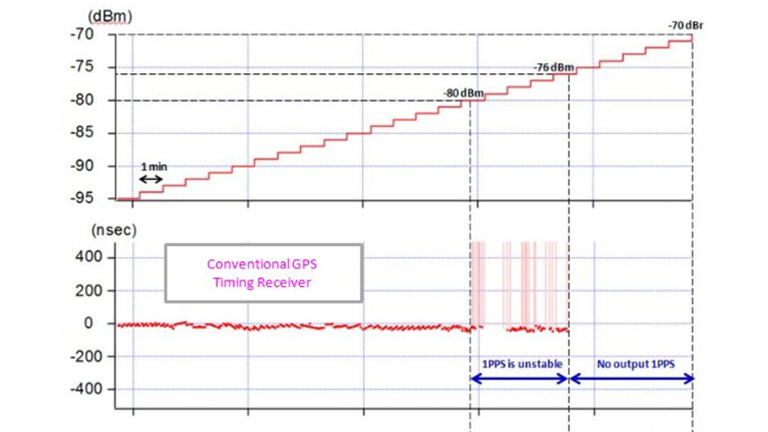
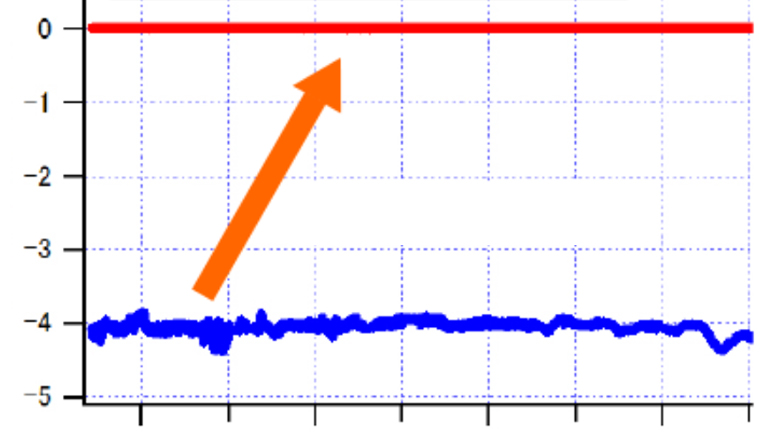
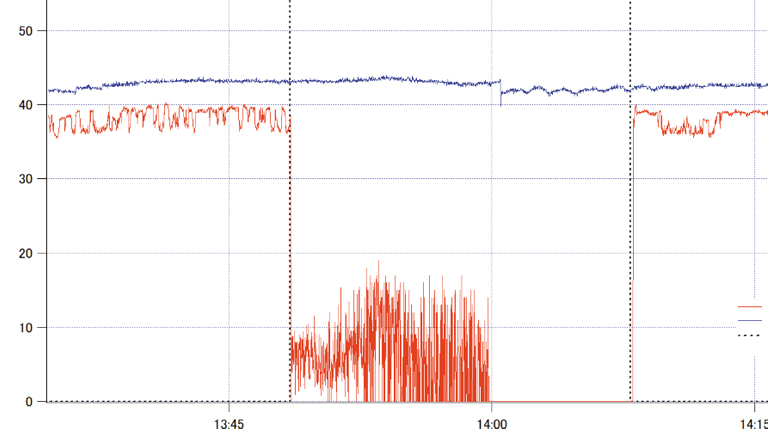
マルチGNSSタイミング受信機のアンチジャミング性能

GPS/GNSS時刻同期に悪影響を与える代表的な障害
時刻同期用GPS/GNSSアンテナの選び方と注意点
フルノGPS/GNSS基準周波数発生器[GPSDO、GNSSDO]

GNSSの信頼性維持は“ベンダーの使命”。 ジャミングなどの妨害に鉄壁の防御
世界の重要インフラを強くする!時刻同期は2周波GNSS受信の時代へ
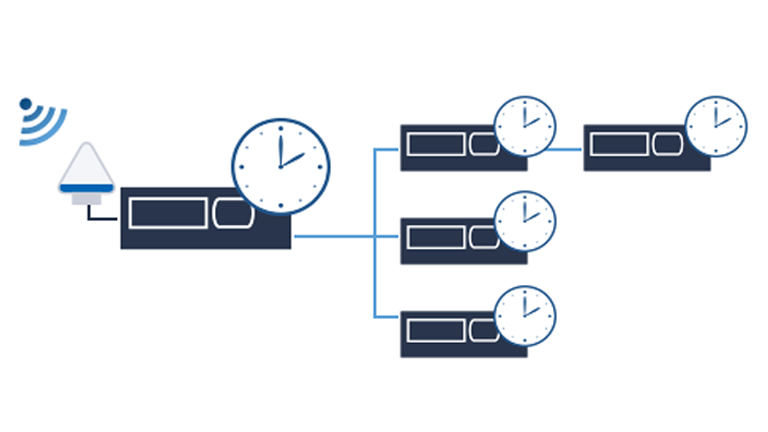
グランドマスタークロックとGPS(GNSS)タイミング技術
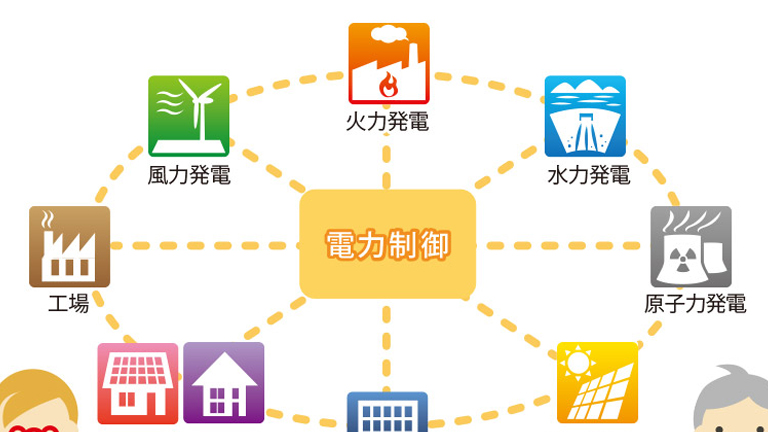
スマートグリッドとGPS(GNSS)タイミング技術
「携帯基地局」とGPSタイミング技術
「地デジ放送局」とGPSタイミング技術
「地震計」とGPSタイミング技術

車車間通信/路車間通信
(インフラ協調システム、ITSコネクト)
高感度GPS(GNSS)とは

高レート測位とは
車両緊急通報システム(eCall、ERA-GLONASS)
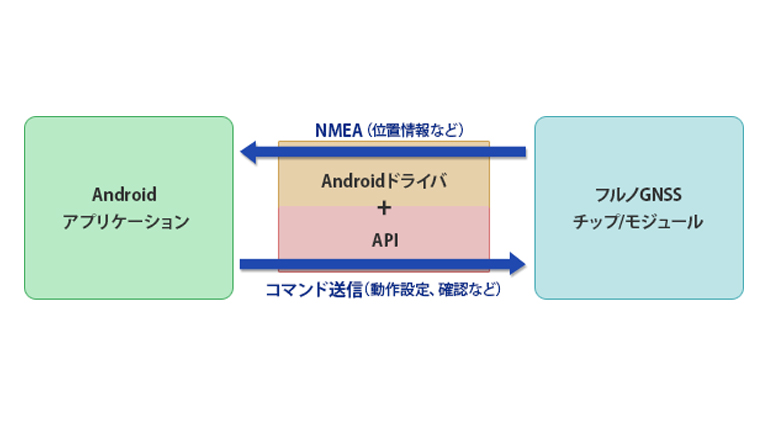
Android™対応について
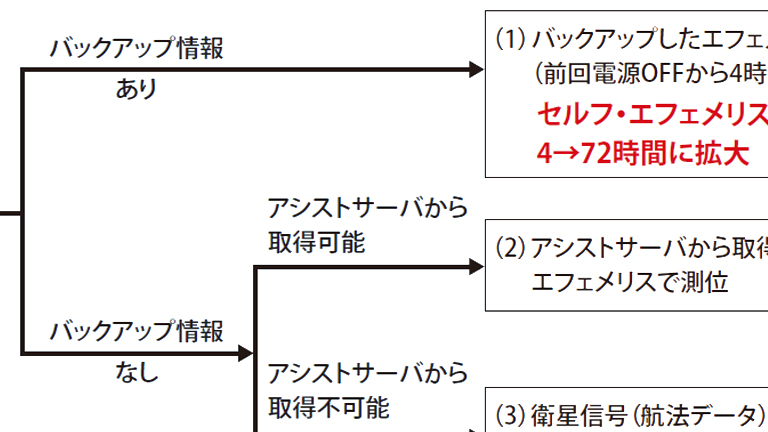
セルフ・エフェメリスとは

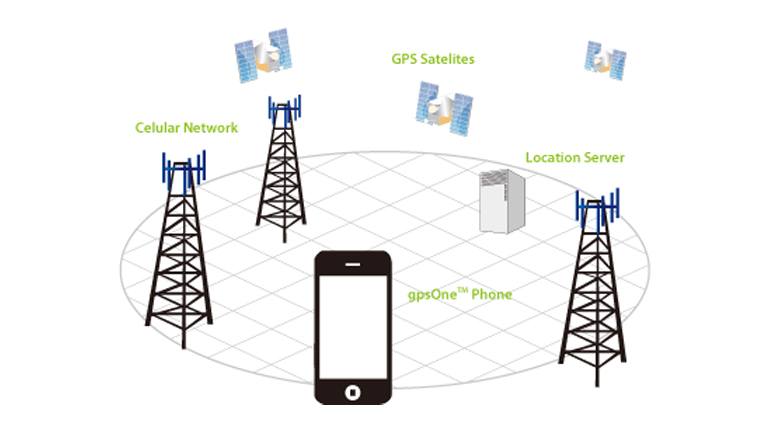
アシストGPSとは
FURUNO GPS開発ヒストリー

10億分の1 秒の世界を整える驚愕の技術。日本のインフラを支えるフルノの"時刻同期" vol.1(公式note:海の音)

10億分の1 秒の世界を整える驚愕の技術。日本のインフラを支えるフルノの"時刻同期" vol.2(公式note:海の音)

GPS/GNSS用語集(時刻同期)
時刻同期用GNSS受信機
車載/産業用GNSS受信機