GNSS (Timing, Automotive/Industrial) Technology
Dead Reckoning (DR)
- Automotive/Industrial
What is Dead Reckoning (DR)?
Precise GPS/GNSS positioning can be achieved only by receiving signals from three to four GPS/GNSS satellites at the same time.
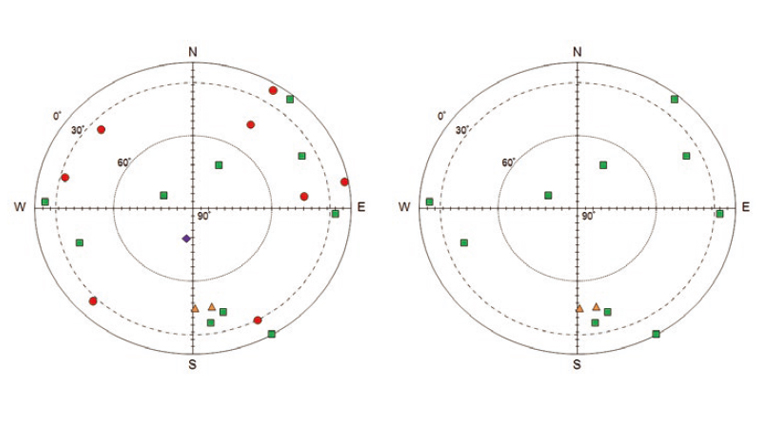
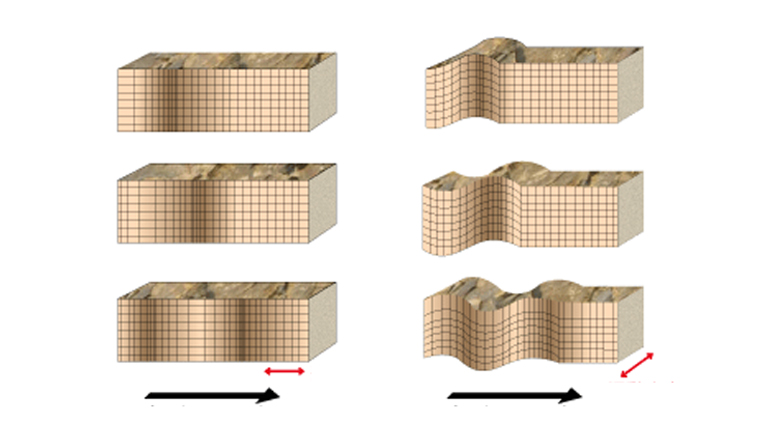
When relying on GPS/GNSS only positioning, there may be cases where the position accuracy is degraded or lost. For example when the vehicle moves in areas where the GPS/GNSS signals cannot be received (tunnels or underground passages) or where very strong multipath propagation occurs (areas surrounded by tall glass covered buildings).
To overcome such limitations of GPS/GNSS positioning, a Dead Reckoning solution is useful. It enables to keep high accuracy positioning by using information from various sensors (gyro sensor, accelerometer, speed pulse, etc.) to calculate the current position, even when GPS/GNSS only positioning is difficult or impossible. Dead Reckoning solution is widely utilized in automotive navigation systems.
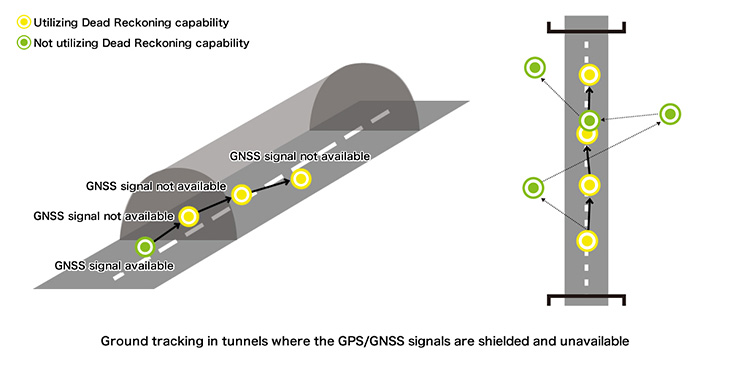
Continues positioning even in the tunnels. Effective also in urban canyons.
FURUNO's Dead Reckoning Receivers use data from Gyro sensor, Accelerometer, Speed pulse, Wheel speed data of two non-turning wheels in various combinations. A Dead Reckoning solution can easily be implemented by connecting the recommended gyro sensor and accelerometer to FURUNO GPS (GNSS) Dead Reckoning Receiver I2C terminal. Likewise, a speed pulse can be directly input to speed pulse terminal of the receiver. The sensors and speed pulse will be automatically calibrated by the receiver.
FURUNO's GPS (GNSS)/Dead Reckoning Receiver will continuously output position in tunnels using our Dead Reckoning function, but also performs hybrid positioning with GPS/GNSS + Dead Reckoning when GPS/GNSS signals are received. This function helps to achieve very high accuracy positioning even in urban canyons where typical GPS/GNSS stand alone receivers cannot perform positioning in high accuracy.
Dead Reckoning positioning
(Continuous positioning even in tunnel)
GNSS-only positioning
(Positioning interrupted in tunnel)
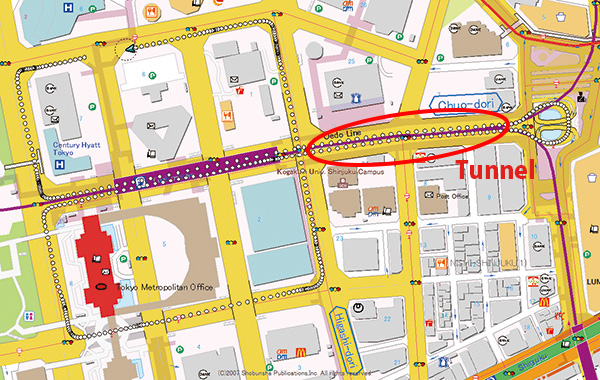
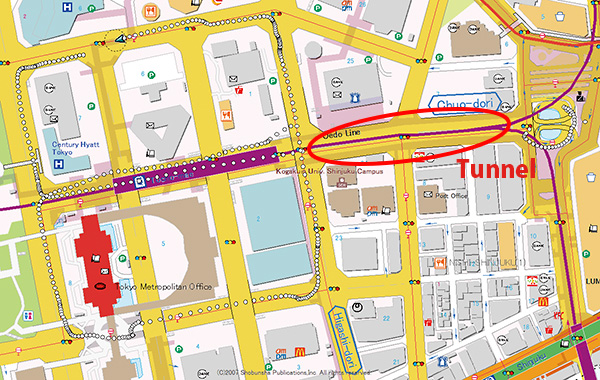
Multi-GNSS + Dead Reckoning: Position accuracy of 2.5m (1σ) has been achieved in urban canyon (Shinjuku, Tokyo, Japan)
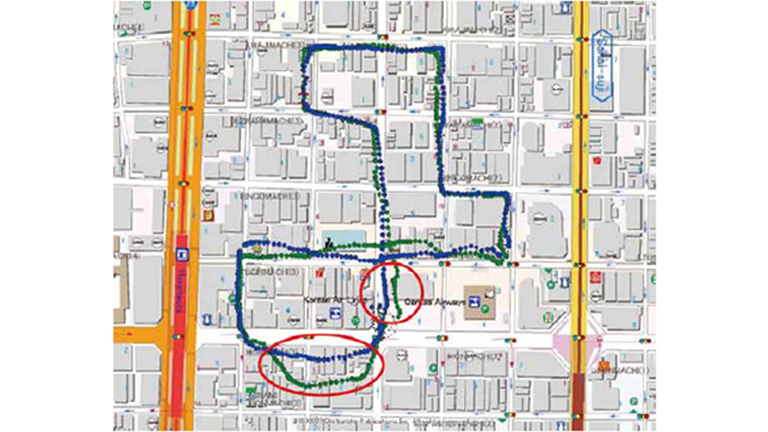
To improve the Dead Reckoning performance, FURUNO's R & D team set our own test course around the Tokyo Metropolitan Government Towers in Shinjuku, Tokyo. It is a very harsh environment of skyscrapers that reflect satellite signals and with tunnels where no satellite signal is received.
FURUNO's GNSS (GPS)/Dead Reckoning Receiver GV-87 has achieved position accuracy of 2.5m (1σ) without position shift from the road. This same environment causes loss of satellite tracking, fluctuation of ground track, position shift and position errors when observed with previous GPS stand-alone receivers.
The new GV series which detects the vehicle position in high accuracy have been developed by integrating FURUNO's conventional signal tracking and positioning calculation technologies for GPS/GNSS receivers. The GV-87 provides superior performance for the most demanding automotive applications. It has concurrent Multi-GNSS reception of GPS, GLONASS, Galileo (when operational), and highly accurate Dead Reckoning function.
The position accuracy is equivalent to or higher than that of in-car navigation system even without map matching. The GV-87 provides an excellent source of position for car navigation systems and for other automotive devices such as fleet management system, tracking devices for commercial vehicles, drive recorders, bus location systems, navigation systems for emergency vehicles where current position accuracy has not been sufficient. The FURUNO products will also help prevent accidents and contribute to safety of driving functions and vehicle-to-vehicle communication and the Advanced Driver Assistance Systems (ADAS) in the future.
Test course in Shinjuku, Tokyo, Japan

[GV-87] Position error: 2.5m (1σ)
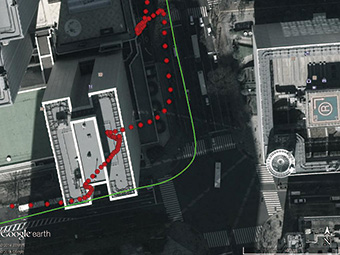
[GPS Receiver] Position error: 10m (1σ)
©Google
●GV-87 , GPS Receiver
●Actual Ground Track
List of Technologies
What is GPS?
Multi-GNSS (Multi-frequency GNSS)
Advanced Multipath Mitigation
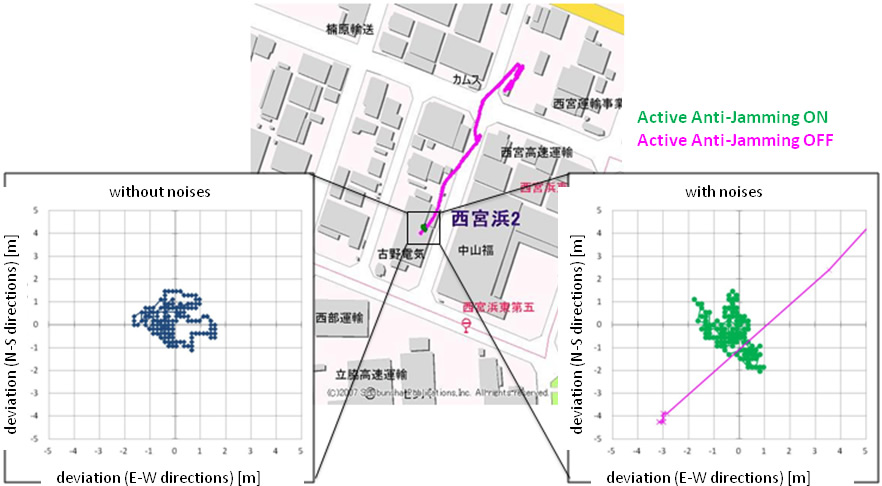
Active Anti-Jamming
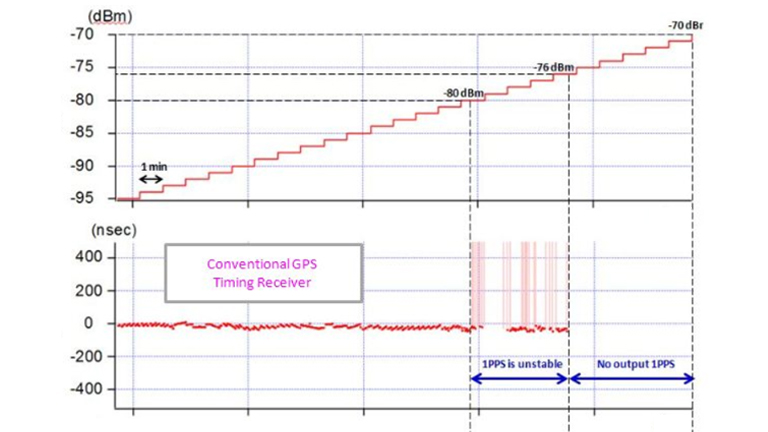
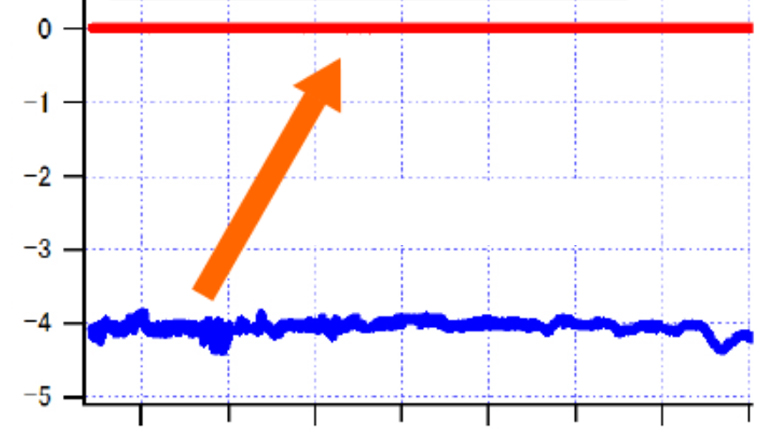
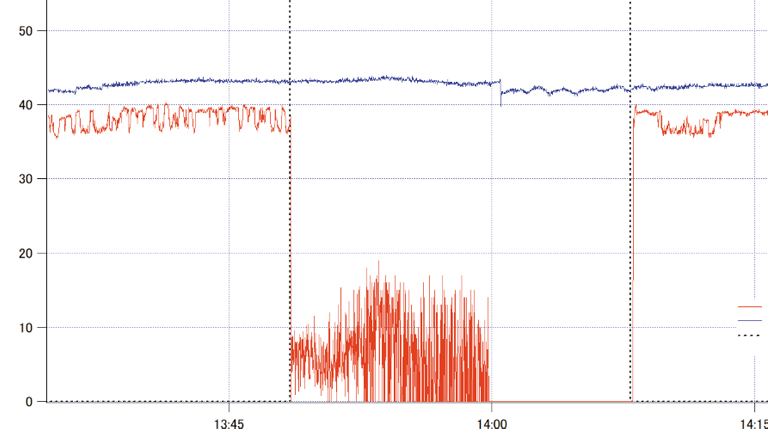
Anti-jamming performance of FURUNO Multi-GNSS timing receivers

Common Problems That Affect GPS/GNSS Time Synchronization
How to select GPS/GNSS antennas for time synchronization
FURUNO GPS/Multi-GNSS Disciplined Oscillator (GPSDO/GNSSDO)

A Vendor's Mission to Preserve Trust in GNSS: Stalwart Defenses Against Jamming and Other Interference
Strengthening Critical Global Infrastructure: Ushering in an Era of Dual Band GNSS Signal Reception for Time Synchronization
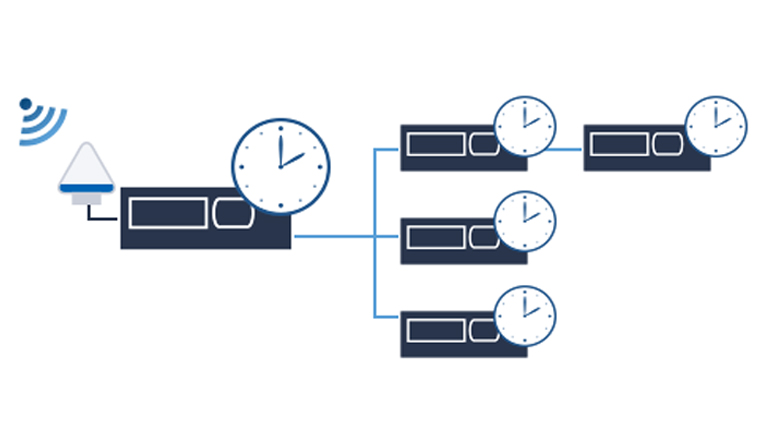
Grand Master Clock and GPS/GNSS timing solutions
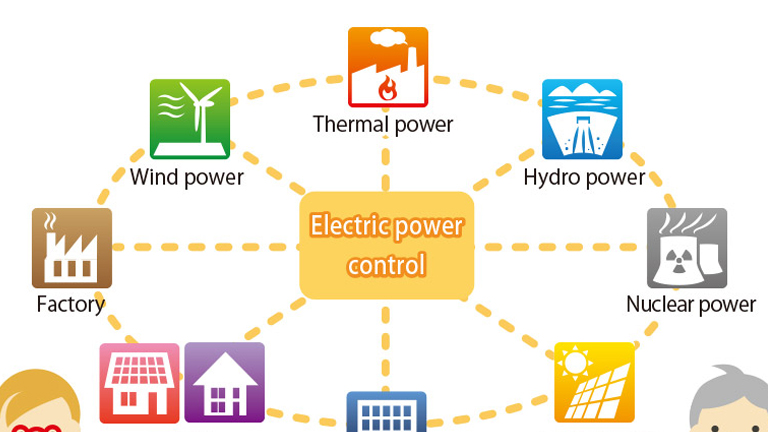
Smart grid and GPS/GNSS timing solutions
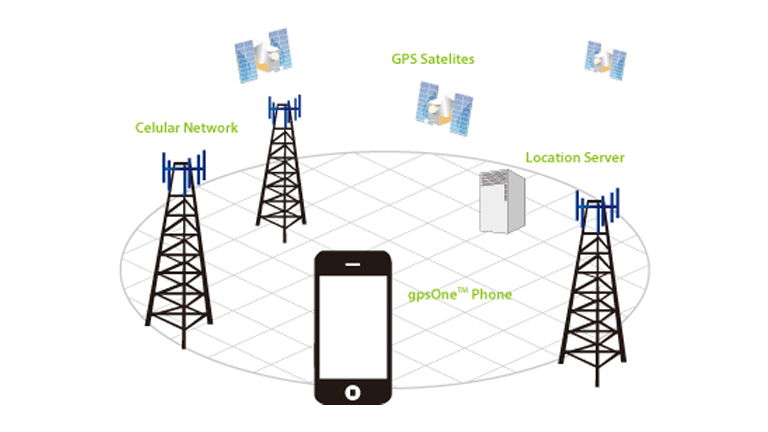
Timing & Synchronization technology adopted base station for mobile telecommunications
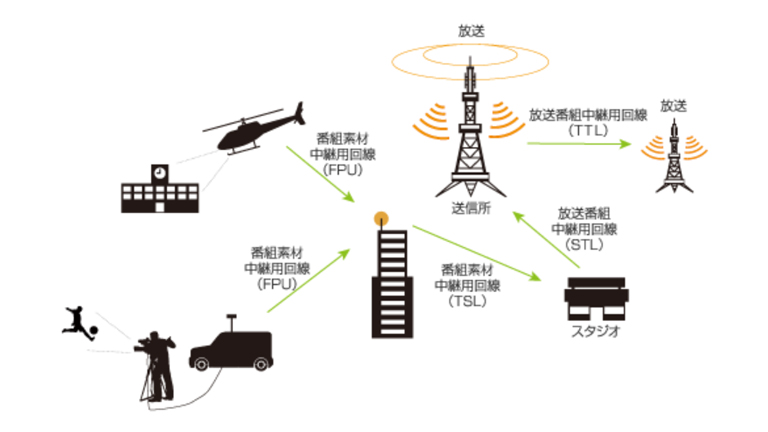
GPS timing synchronization and terrestrial digital broadcasting
Timing & Synchronization technology adopted base station for Seismograph and GPS timing technology
High Sensitivity GPS

Positioning at 10Hz update rate
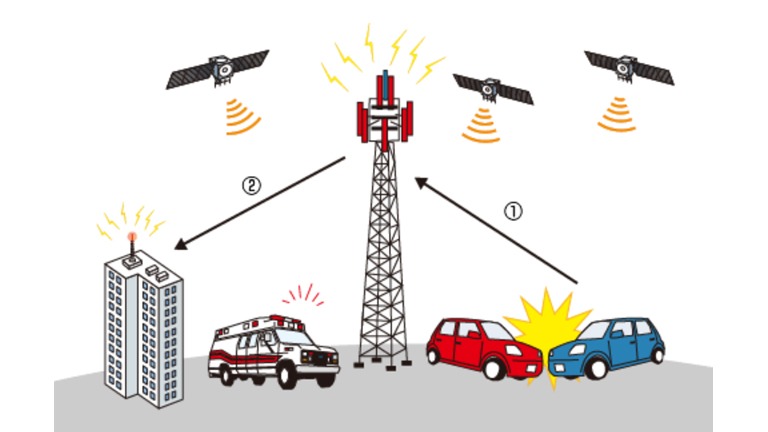
Automated emergency response systems (eCall / ERA-GLONASS)
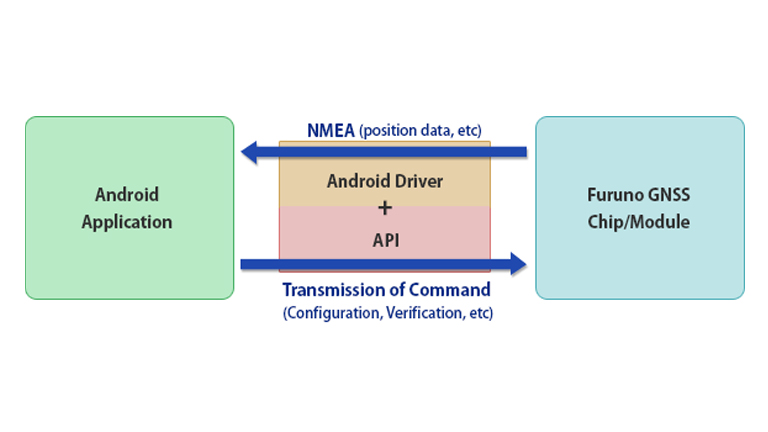
Supporting Android™
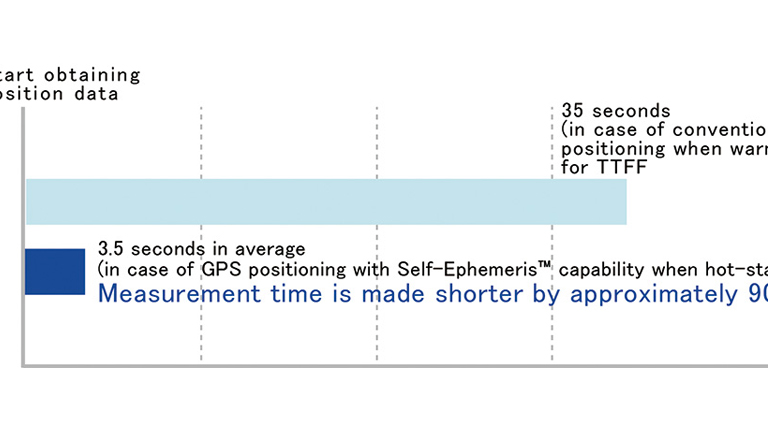
Self-ephemeris™

AGNSS (Assisted GNSS)
GPS/GNSS Glossary(Timing)
GNSS for Time Sync
GNSS for Automotive & Industrial
GNSS Antennas・Accessories
Multi-GNSS Timing Antennas AU-500/AU-300
Multi-GNSS antenna (For Timing) AU-217
GPS Antenna (For Timing) GPA-014
Antenna Mounting kit AFB-01
Antenna Fixing Bracket CP20-01111/CP20-00403/PM-001
Coaxial lightning arrestor TVA-03C/TVA-03V
GNSS Surge Protector TVA-05V
Multi-GNSS antenna AU-18
GPS Antenna AU-15