デュアルバンド時刻同期用GNSS受信モジュール
型式
GT-100L1/L5の2周波受信により世界最高水準の堅牢性と時刻精度を実現
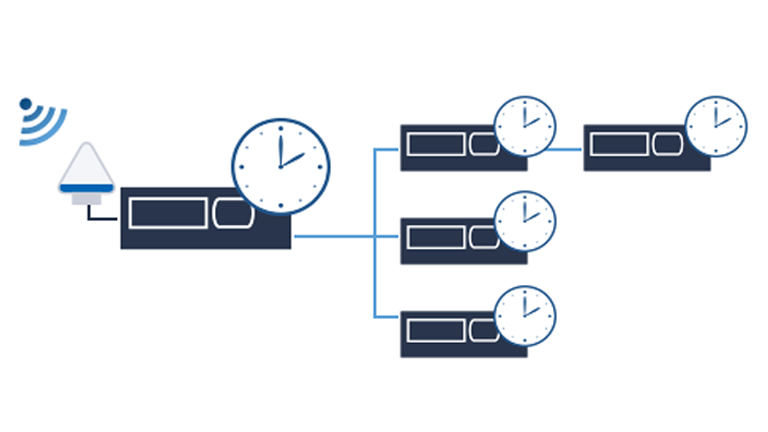
GPS/GNSS受信機は、衛星信号を受信することで、位置だけでなく正確な時刻を算出できます。時刻の情報は、時刻同期や正確な周波数を必要とする携帯電話基地局、地デジ放送局、無線システムなどのインフラに活用されています。
このページでは主に、時刻に注目して各種用語の説明をおこないます。また、関連するGPS/GNSSの一般用語についても説明します。
フルノのGNSS受信機(GF/GT-88シリーズ)に適した内容となっております。
「※」は特に、フルノ独自の用語になります。
関連リンク:
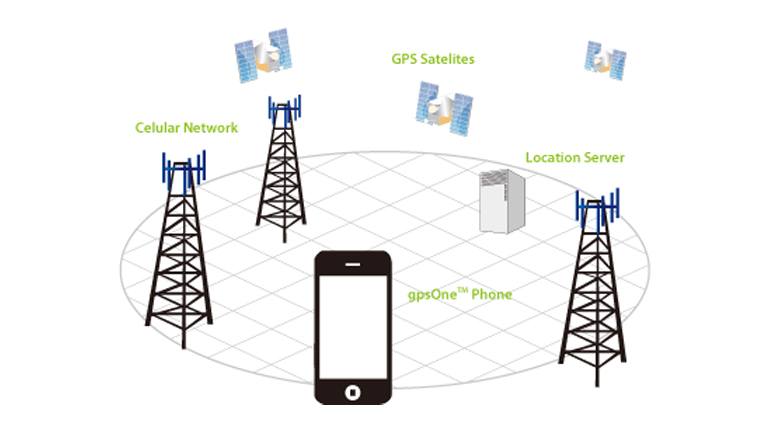
アメリカによって運用されている人工衛星です。グローバル・ポジショニング・システムの頭文字を取ってGPSと呼ばれています。1978年に最初のGPSが打ち上げられて以来、幅広い分野で用いられています。ちなみに、GPSという名称があまりにも有名になってしまったために、GPSが衛星の名前であると思われがちなのですが、実はNAVSTAR(ナブスター)という正式名称が別に存在していたりします。
ロシアによって運用されている人工衛星です。グローバル・ナビゲーション・サテライト・システムの頭文字を取ってGLONASSと呼ばれています。
欧州連合であるEUによって運用されている人工衛星です。GPSなどが軍事衛星であるのに対し、Galileoは民間主体の衛星であることを特徴としています。
中国によって運用されている人工衛星です。Beidou、現在はBDSと略すことが多いですが、別名でCOMPASSやCNSSと呼ばれていたこともあります。
インドによって運用されている衛星衛星測位システムです。2020年時点では、本衛星システムは人工衛星7基体制で構成されており、インド周辺を主なカバーエリアとしています。なお、かつてはIRNSSという名称でしたが、2016年にNavICに名称変更されました。
準天頂軌道の衛星が主体となって構成されている日本の衛星測位システムです。みちびきとも呼ばれます。みちびきを構成する衛星が8の字を描くように動くことで、日本の上空に滞在する時間が長くなるように設計されています。日本および太平洋地域を主なカバーエリアとしています。
GPSなどを利用して得られる位置や時刻の精度を向上させる目的で、補正情報などを送信している静止衛星型衛星航法補強システムの略称です。米国によって管理されているWAAS、ヨーロッパによって管理されているEGNOSなどがあります。日本においても、2020年4月からQZSSの静止衛星を用いたSBAS配信サービスが開始されています。
グローバル・ナビゲーション・サテライト・システムの略称です。GPS、GLONASS、Galileo、Beidou、NavIC、QZSS、SBAS等の衛星の総称として用いられます。
衛星を用いた測位システムを主流にしたのがGPSであったために、衛星を使って自分の現在位置等を取得することを「GPSを利用する」としばしば表現しがちですが、近年では米国以外も多数の人工衛星を打ち上げているため、GNSS業界ではそれらの衛星の存在も考慮して、測位に衛星を利用することを「GNSSを利用する」と意識的に表現することがあります。
なお、既にお気付きかも知れませんが、GLONASSとGNSSはどちらもグローバル・ナビゲーション・サテライト・システムの頭文字を取ったものなので、実は意味が被っています。ただ、GNSS業界では、GLONASSと略すとロシアの衛星を指し、GNSSと略すと衛星システム全体の総称を指しているものとして、平然と扱われています。
コンステレーションは星座という意味ですが、GNSS業界では各国の衛星システムを指して用いられることがあります。たとえば、「この受信機は、GPSとGLONASSの2つのコンステレーションに対応している」といった表現をすることがあります。
Interface Control Documentの略です。衛星が放送する内容や仕組みを、その衛星を運営している国の関係部門が仕様書として規定した文書です。衛星コンステレーション毎に、それぞれICDが存在します。GNSS受信機は、これらの文書を参照して設計されることが一般的です。
なお、ICDは恒久的な仕様定義を謳うものではなく、誤記の訂正や機能拡張を目的として、改定が行われる場合があります。それに合わせて放送内容の一部が変更される可能性もあります。
各衛星に与えられたシリアル番号です。衛星コンスタレーション別に、重複しない番号が割り当てられています。たとえばGPS衛星の場合では、2020年9月時点でSVN76の衛星まで確認されています。このSVNの中には運用されている衛星もあれば、寿命によって退役した衛星も含まれています。GNSS受信機を利用しているユーザー向けの番号というよりも、衛星を管理している側のための番号であり、ユーザー向けの番号としては、以下のPRNを用いることが一般的です。
直訳すると、擬似ランダムノイズとなりますが、ユーザーの視点からすれば別にノイズでも何でもなく、単に各衛星に割り当てられた識別番号、となります。GPS衛星のL1C/A信号の場合、PRNが1~32まで確認できます。
各衛星は、その放送メッセージの中にPRNコードと呼ばれるものを含んでいます。これは「一見するとランダムに見える複雑なものだけれど、実は常に固有パターンの周期信号」というもので、GNSS受信機はこのPRNコードを、いわば各衛星の名刺代わりとして受け取り、それによってメッセージがどの衛星から到来してきたかを判断します。PRNは衛星を識別するための鍵のような存在であり、ここから転じてPRNという表現を、衛星番号として扱っている経緯があります。
PRNは衛星コンスタレーション別に定義されているため、GPS衛星のPRN1番と、GLONASS衛星のPRN1番は同時に存在することが一般的です。しかしGNSS受信機を扱っているユーザー側は、そのPRN1番がどちらのコンスタレーションのものであるかを判断しなければならないときもあります。その場合は、GSAセンテンスの場合はGNSSシステムIDを、GSVセンテンスの場合はトーカIDを確認することで、それぞれの識別を行うことが可能となっています。
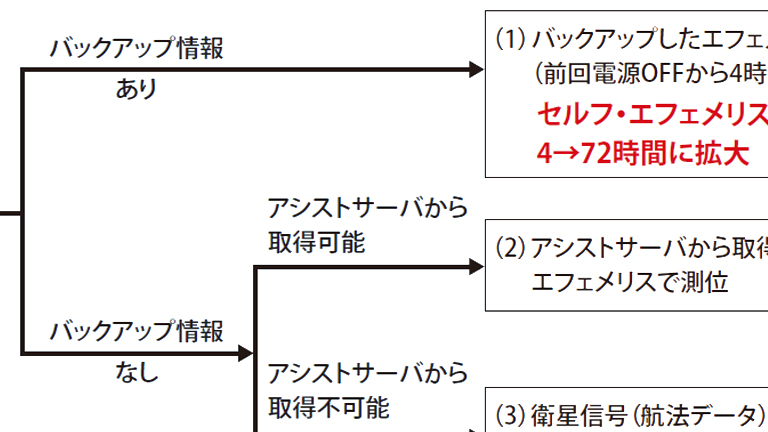
衛星が放送している情報の一種です。衛星時刻や、衛星自身の詳細な軌道情報を示します。測位に必要な情報であり、短い周期で繰り返し放送されるのが特徴です。
GPS衛星 L1C/A信号の場合、30秒周期でエフェメリスが放送されています。
エフェメリスが受信機に残っている状態で起動することを、特にHOT STARTと呼称します。
衛星が放送している情報の一種です。各種補正情報、UTCパラメータ、全ての衛星の大まかな軌道情報を放送しています。GPS衛星の場合、750秒周期でアルマナックが放送されています。そのため、初期測位後、GPS同期からUTC同期になるまで、最大750秒を要する場合があります。
アルマナックが受信機に残っている状態で起動することを、特にWARM STARTと呼称します。エフェメリスもアルマナックも受信機に残っていない場合、COLD STARTとなります。
各国のSBASは、GPSと同一のL1周波数にてGPSを補強するための信号を放送しています。この補強信号により、インテグリティ機能、ディファレンシャル補正情報、測距機能を提供しています。この内、ディファレンシャル補正情報を測位に用いることで、測位精度を改善することが可能です。
QZSS L1S信号から放送されている、サブメータ級測位補強サービスのことです。電離圏遅延や軌道、クロック等の誤差の低減に活用できる補正情報が含まれています。
QZSS L1S信号を受信している場合に利用が可能ですが、利用可能範囲は2020年現在、日本国内および日本近海に制限されます。
GNSS衛星の信号を得るためには、受信機に専用のアンテナを接続し、そのアンテナを経由する必要があります。GNSSアンテナの大きさはスマートフォンに内蔵できるような小型のものから、長期にわたって屋外設置することを目的とした、耐環境性に優れたものまで、様々な製品が存在します。衛星によっては放送している信号の周波数帯が異なる場合があるため、GNSSアンテナを選択する際には、目的の衛星の周波数帯を受信できる仕様になっているかどうか、に留意する必要があります。
GNSSアンテナの周囲に、ビルや木々などの遮蔽物がない環境のことを、GNSS業界ではごく一般的にオープンスカイと表現することがあります。オープンスカイの環境では、GNSS衛星の信号を遮蔽したり、反射させたりする要素がないために、GNSS受信機が算出する位置や時刻の精度が良好になることが知られています。そのため、一般的にどのGNSSメーカーの仕様書でも、受信機およびGNSSアンテナをオープンスカイ環境に置くことを推奨しています。ちなみに、GNSS受信機の担当者は、田舎の田園風景などを見たときに、景色が綺麗だと感じる前に、ここは良いオープンスカイだ、と反射的に思ってしまうことが多々あります。
インドアという単語を直訳すると屋内となりますが、GNSS業界では、GNSS信号を良好に受信できない環境全般をインドアという言葉で括ることがあります。いわゆるオープンスカイと対となる表現となっているため、室内の窓際で使用する場合をはじめ、屋内ではなくても、遮蔽物の多い都市部や高架下などでは、GNSS受信機の仕様書としては、インドア環境として扱われることがあります。なお、インドアという表現から考えれば、窓ひとつ無い完全な密室もインドアに含まれるはずですが、そのような環境ではGNSS信号を直接受信することが不可能なため、仮にインドア時の性能を記載している場合でも、そのような環境は暗黙的に除く、という、一般的視点から見るとやや不条理に映るGNSS受信機の仕様書もあるので注意が必要です。
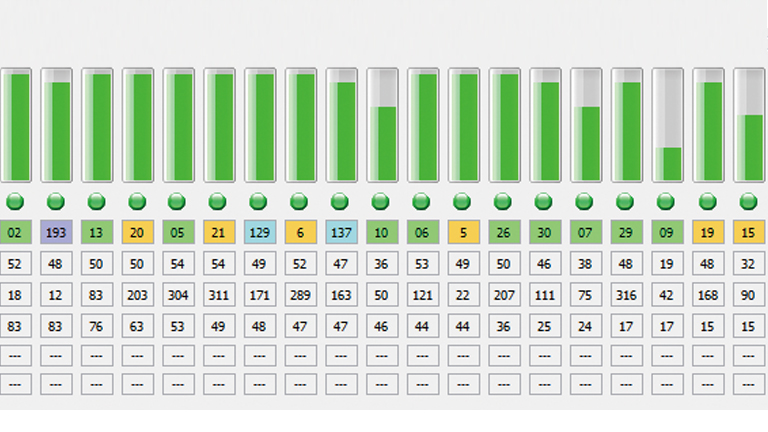
GNSS受信機は、衛星から受信した信号の強度を表す値を出力しています。信号強度を表現する方法としては、信号対雑音比 SNR(Signal to noise ratio)と呼ばれる表現と、搬送波雑音電力密度比 C/N0(Carrier to Noise Density Ratio)と呼ばれる表現があります。どちらも雑音に対する信号強度を示すものですが、GNSS受信機が出力する信号強度は、C/N0であることが多いです。信号強度の単位は、dB-Hzが用いられます。
信号強度を指す単位のひとつです。デシベルミリワットと読みます。デシベルミリワットは電波や光ファイバー中の信号の強さを表すときに用いられる値で、GNSS業界でも一般的に用いられます。ただし、デシベルミリワットは対数関数から計算されるものであるため、読み方には多少の事前知識が必要となります。たとえば、信号が強くなればdBmも大きくなるというあたりは直感と合致しますが、信号が限りなく弱くなっていくと、本値は0を通り越してマイナス値も取り得ます。むしろGNSS衛星の信号は非常に微弱であるため、オープンスカイ環境であっても-130dBm付近を取ることが一般的です。なお、デシベルミリワットでは、値が3下がるたびに、その信号の強さが1/2になっていきます。
信号強度を示す単位のひとつです。GNSS受信機では、各衛星から受信した信号の信号強度を、GSVと呼ばれているセンテンスにて出力しています。単位はdB-Hzです。dBは相対値を意味しており、上述のdBmとは異なる単位になります。たとえば「50dBm - 20dBm = 30dB」のように、単位に注意する必要があります。
また、GNSS受信機では、室温における1Hz帯域の熱雑音である「-174dBm」を基準とするのが一般的で、C/N0もそこからの変化分(差分)として計算された値となります。たとえばC/N0が40dB-Hzと表現されている場合、それは-134dBmと読み替えることが可能です。
(-174dBm + 40dB = -134dBm)
熱によって生じる無秩序なノイズのことです。これは信号の送受信を阻害する要因のひとつであり、熱雑音よりも小さな信号強度の信号は、たとえ送信してもノイズに埋もれて相手は正しく復調できません。そのため室温における熱雑音「-174dBm」が、GNSS受信機においても受信限界値と見做されており、C/N0を計算するときの基準として用いられています。
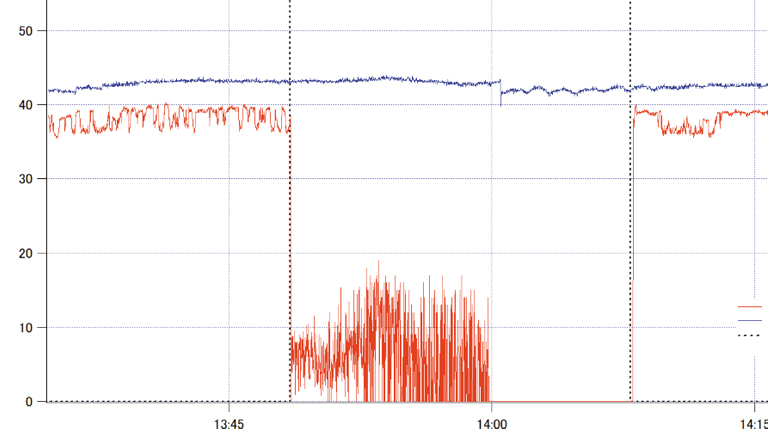
衛星信号の周波数帯域に混入されている、衛星信号以外の信号を指します。他の機器のノイズが偶然混入する場合や、悪意のある者によって意図的に放送され、混入する場合があります。
妨害波を受信してしまうと、その間、通常の衛星信号の周波数を受信できなくなり、測位不良や測位不能な状態に陥る場合があります。
妨害波が混入されても、その妨害波を検出し除去することで、衛星信号の受信を通常通り行えるようにする機能です。ただし、全ての妨害波の検出・除去は極めて困難であることから、アンチ・ジャミングによりできること、できないことを適切に把握することが重要です。
悪意のある者が、シミュレータに類するものを利用して、GNSS衛星の放送内容を模倣して生成した信号を指します。この信号を受信すると、位置や時刻に影響を及ぼす可能性があります。
なりすまし信号(スプーフィング信号)が混入されても、その信号の影響をできる限り低減し、現在位置や時刻の算出を通常通り行えるようにする機能です。ただし、全てのなりすまし信号の検出・除去は極めて困難であることから、アンチ・スプーフィングによりできること、できないことを適切に把握することが重要です。
地球の自転と時刻基準となる原子時計との差に開きが生じないように、世界で一斉に挿入される1秒の事を指します。閏秒挿入は1972年より実施されており、将来的に閏秒挿入の概念が廃止されない限り、数年に一度の割合で挿入されることがあります。閏秒挿入はプラス1秒する場合とマイナス1秒する場合があり、閏秒の挿入が決定した場合は、実施の1~2か月前までには告知・放送がなされます。閏秒挿入のタイミングは、各四半期の終わりと規定されていますが、1月1日または7月1日へ日付が変わる時に挿入されることが一般的です。なお、閏秒の始まりは上述の通り1972年からとなっていますが、GPSの運用が開始されたのが1980年1月6日であることに倣い、当社のGNSS受信機では、閏秒の累積値について、1980年1月6日を起点とした値を出力する仕様としています。2020年8月時点において、上述の仕様に基づく閏秒の累積値は+18秒となっています。
日曜日の00:00:00を起点とした累積秒です。土曜日の23:59:59で604799となり、次の日曜日で再び0に戻ります。各国のGNSS衛星は、この週内秒と、後述する週番号の概念で、現在時刻を放送しています。
一般用語としての週番号は、おおむね年の始まりを起点として、1年のうち現在が何週目であるかを示すものとして用いられますが、GNSS業界では、たとえばGPSの場合、1980年1月6日を起点の0週として、そこから年を跨いでもカウントをリセットすることなく、そのまま週の累積を続けたものを、週番号として呼称します。ただし衛星システムによっては放送できるBITサイズに制限があり、たとえばGPS L1C/Aと呼ばれる信号の場合、週番号のために用意されたデータサイズが10BITしかないため、1023の次が0に戻ります。
Coordinated Universal Timeの略で、協定世界時を意味します。閏秒を常に考慮した時刻で、各国の時差やサマータイムなどを考慮すれば、普段我々が利用している時刻と一致します。UTCは各国が保有する原子時計によって国毎にそれぞれ定められており、整数秒以上ではどの国のものでも違いは見られませんが、ナノ秒スケールにおいてはわずかに異なっています。たとえば米国の場合はUnited States Naval Observatoryが定めており、そのUTC時刻のことをUTC(USNO)と呼称します。同様に、ロシアの場合はUTC(SU)となります。
GPS衛星またはQZSS衛星が放送する時刻系です。1980年1月6日を起点として、それ以降の閏秒挿入を無視した時刻として放送されます。すなわち、1980年1月6日以前の閏秒は加味するが、1980年1月6日以降の閏秒は将来の閏秒挿入も含めて一切無視するという時刻仕様です。GPS/QZSSからは、週内秒と週番号という概念で時刻が放送されており、受信機側はそれらの情報を変換することで現在時刻を生成します。整数秒以下の、ナノ秒スケールにおいては、厳密にはUTC時刻とは異なりますが、近年ではUTC時刻とGPS/QZSS時刻の時刻差は数ナノ秒程度です。ただし将来にわたってこの誤差量が維持される保証はありません。
GLONASSが放送する時刻系です。1996年1月1日を起点とした、以後の閏秒の挿入を常に考慮した時刻です。2100年まで一意に変換できる時刻パラメータを放送しているのが特徴で、GLONASSを受信することで、後述する週番号ロールオーバーの問題にも、自動で対応が可能となります。
Galileoが放送する時刻系です。ICD上は1999年8月22日を起点としていますが、実質的にはGPS時刻と各パラメータが一致するよう、1980年1月6日を起点とした、それ以降の閏秒挿入を無視した連続した時刻として放送されます。2078年2月19日まで一意に変換できる時刻パラメータを放送しているのが特徴で、Galileoを受信することで、週番号ロールオーバーの問題を2078年まで意識せず、正しい時刻を表示することが可能となります。
各衛星が放送している、各衛星の時刻系をUTC時刻に変換するためのパラメータのことです。主に、うるう秒の積算値や、うるう秒挿入タイミング、ナノ秒スケールの補正情報が含まれています。ただしGLONASS衛星は時刻系に最初からうるう秒が含まれているため、うるう秒の積算値は放送されていません。UTCパラメータは、一般的にアルマナックと呼ばれる航法メッセージ群に含まれており、放送間隔に開きがあります。
各国のGNSS衛星はおおむね、前述の週内秒と週番号という概念で現在時刻が放送されています。しかし衛星信号の種類によっては、この週番号のデータサイズに制限があります。たとえばGPS L1C/A信号の場合、この週番号のデータサイズが10BITであるため、表現可能な範囲は0から1023週となっています。これは週番号1023の次は0になることを意味しており、この週番号が0に戻るタイミングのことを、週番号ロールオーバーと呼称することがあります。この週番号ロールオーバーが発生すると、特別な対策を施していないGNSS受信機では、日付が1024週ずれて出力される場合があります。なお、当社のGPS/GNSS受信機の多くはこの週番号ロールオーバーの問題に適切に対応しており、放送される週番号が1023から0になった場合も、正しい時刻が継続表示できます。ただし適切に変換できる時刻範囲が最大1024週までである事に変わりはなく、どの日付まで適切な時刻表示が継続できるかは、製品によって異なります。詳細は各製品の仕様書を参照ください。
週番号の表現方法やデータサイズは、衛星システムや信号によって異なっており、データサイズが大きい衛星を受信している場合、週番号ロールオーバーの問題を回避できる場合があります。
GPS衛星等からまだ閏秒の情報を取得していない時に、暫定的にセンテンス出力時刻をUTC時刻に近づけるために適応される値です。本値はコマンド等で設定できるため、これを事前に適切に設定しておくことで、UTCパラメータを取得する前から、UTC時刻相当の情報を早々にGNSS受信機から得ることができます。なお、本設定は正しい閏秒を取得する前の時刻表示にのみに用いられるものであり、本値が誤っていても衛星信号の受信や測位などには影響を及ぼしません。
Local Zone Timeの略です。世界協定時からの時刻オフセット値を意味します。
GNSS受信機から出力される時刻情報のばらつき(再現性の高さ)を数値で示したものです。分散値などは、こちらに該当します。
GNSS受信機から出力される時刻情報の確からしさ(真値との誤差)を数値で示したものです。
時刻精度と時刻確度は似て非なるものであり、当社では特に意識的にこれらの使い分けを行っています。精度と確度(正確度)という用語はJIS規格でも登場します。JIS規格によれば、精度とは複数試行の間での互いのばらつきの小ささの尺度とされており、確度とはその値が「真値」に近い値であることを示す尺度とされています。たとえば時計で考えた場合、その時計が正しい時刻から大幅にずれていた場合、その時計は「確度が低い」と表現され、そのずれ量を何か月もずっと同じまま維持できているのであれば、その時計はしかしながら「精度は高い」と表現されます。確度が低ければそもそも実用に耐えられませんし、精度が低ければ短期的な時刻の観測には向いていないことになります。したがって時刻精度と時刻確度は両方重要であり、個別に議論すべき仕様であると当社は考えています。
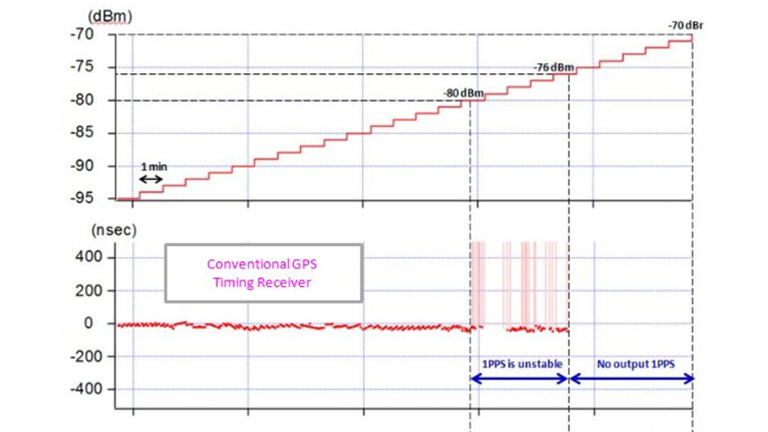
Pulse Per Secondの略です。1秒に1パルスを出力することを、1PPSと呼称します。1PPSは1Hzのクロックに相当します。タイミング用途のGNSS受信機などでは、この1PPSのエッジをGPS時刻またはUTC時刻に正確に同期させることで、高精度な時刻情報を外部に提供します。
なお、1秒に2回のパルスを出力することを2PPSと表現したり、逆に、2秒に1回のペースでパルスを出力することをPP2Sと表現したりすることがあります。
UTC時刻に同期して、時刻、PPS、周波数などを出力している状態です。本同期に遷移するためには、衛星信号を受信して時刻を算出する以外に、UTCパラメータの受信も必要となります。
GPS時刻に同期して、時刻、PPS、周波数などを出力している状態です。衛星信号を受信して時刻を算出した場合で、GPS時刻同期モードに設定しているか、UTCパラメータが未取得の場合に遷移します。
RTCとは、Real Time Clockの略です。当社の一部タイミング製品では、衛星信号を受信して時刻を確定させる前や、衛星からの信号の受信が一時的に中断した場合において、PPSや周波数が可制御の状態にないことを明示的に示すために、RTC時刻同期という表現を用いることがあります。
GNSS衛星を受信して受信機の時刻を確定させるモードです。下記のEPPS同期と対になります。一般的なGNSS受信機は、こちらのモードとなります。GNSS同期モードに設定している場合、さらに上記のGPS時刻同期やUTC時刻同期などの細かな状態に分類されます。
GNSS衛星を利用せず、EPPSピンから入力された時刻信号を時刻源とするモードです。GNSS同期と対になります。当社の一部のタイミング製品で対応しています。
アンテナとGNSS受信機の間をケーブルで接続した場合、そのケーブル長に応じてPPSに遅延が発生します。この遅延をケーブルディレイ、または、ケーブルオフセットと表現することがあります。一般的なGNSS受信機は、この遅延をコマンドによって補正可能です。
GNSS受信機のシステムクロックと、当社の一部のタイミング製品で内蔵されている専用ブロックを利用して、任意の周波数を生成する仕組みです。GNSS衛星を受信することによって、精度よく、任意の周波数を出力させることができます。ただし、GCLK周波数に含まれるジッタやスプリアスなどが、ご利用いただくアプリケーションで許容できる範囲であるか否かを、事前にご確認いただく必要があります。
電圧制御型発振器が出力する周波数です。当社の一部のタイミング製品で出力可能です。GNSS衛星信号を受信している間は、GNSS衛星から取得した時刻をもとに周波数を調整し、極めて安定したクロックを提供することができます。
上記のVCLK周波数を分周して生成したPPSです。VCLK周波数のクロックエッジと、PPSのパルスエッジが同期している点が特徴です。当社の一部のタイミング製品で出力可能です。
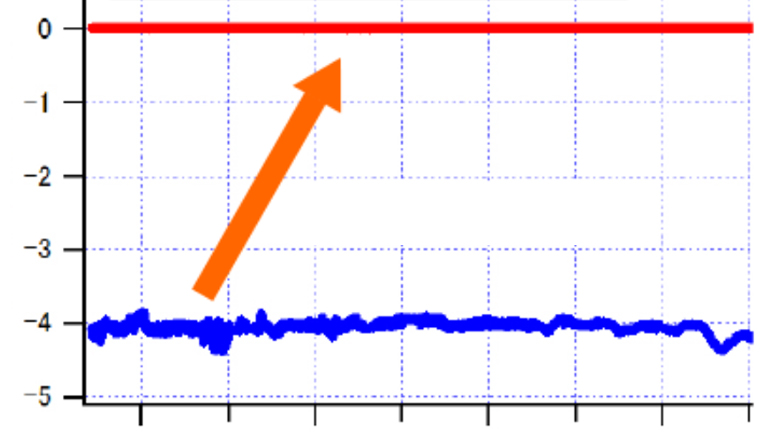
GNSS衛星が受信できない期間においても、高精度・高確度な1PPSや周波数特性をできる限り維持しようとする機能を指します。当社の一部のタイミング製品でも対応しています。
ホールドオーバ実施の前段階にあたり、GNSS衛星から得られる時刻情報を基準として、発振器側の変動特性を詳細に調べ上げることを、当社では学習と呼称することがあります。この学習はユーザー側は特に意識する必要はなく、GNSS受信機内部で自動で行われます。なお、この学習を行っている期間のことを学習期間、または、学習時間と呼称することがあります。
VCLK周波数を出力できる一部のタイミング製品で参照頂けます。主にVCLK周波数の安定状態を示しており、以下の6種類が存在します。
WARMUP:電源投入直後の、内部クロックの安定待ちをしている状態です。
PULL-IN:GNSS受信中であり、GNSSから得られた時刻をもとに、VCLK周波数とPPSを同期対象に同期させている途中の状態です。
COARSE LOCK:GNSS受信中であり、GNSSから得られた時刻をもとに、VCLK周波数とPPSが同期対象に同期している状態です。ただし、FINE LOCKよりも同期精度は粗くなります。
FINELOCK:GNSS受信中であり、GNSSから得られた時刻をもとに、VCLK周波数とPPSが同期対象に、精度よく同期している状態です。
HOLDOVER:GNSSが受信できなくなった時、事前にホールドオーバのための学習が完了していれば、このモードに遷移します。発振器の周波数経年劣化特性や周波数温度特性を考慮した最適な制御を自動で行い、自走状態よりも良好な周波数とPPSを提供します。
OUT OF HOLDOVER:ホールドオーバが終わった後か、ホールドオーバのための学習を満たしていない状態でGNSSが受信できなくなった時、このモードに遷移します。
GNSS受信機が、衛星からの情報をもとに、受信機の位置、速度、時刻、方位などの各種情報を計算することを指します。一般的にはカルマンフィルタを用いる計算方法が有名ですが、性能を向上させるための極めて重要な要素であるため、各GNSSメーカーはこの測位演算のアルゴリズムの改良に日々取り組んでいます。
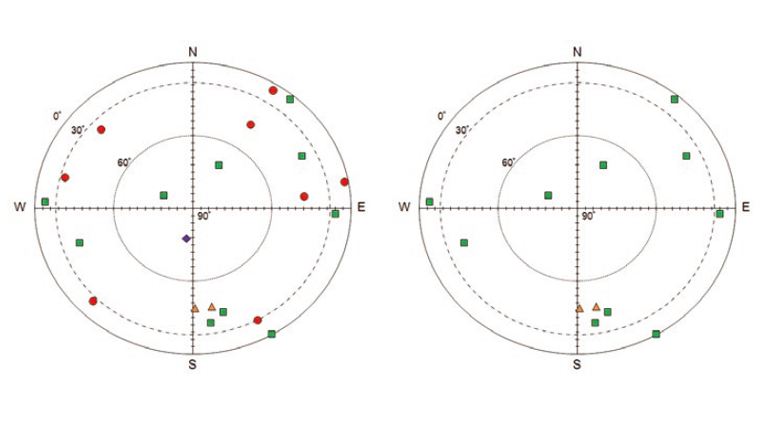
なお、測位演算によって算出される位置や時刻の精度の良し悪しは、GNSS受信機(厳密に言えば、その受信機に接続されているアンテナ)の設置環境にも大きく左右され、信号レベルの高いGNSS衛星をどれだけ多く受信できているか(周囲が開けた場所で利用しているか)、それらの衛星があらゆる方角に散らばっているか(遮蔽物があって、受信できる衛星の方角に偏りがあったりしないか)などが大きく影響します。
GNSS受信機が、測位演算時に利用する情報のひとつです。
衛星と受信機との距離を計算した結果です。
GNSS受信機が、測位演算時に利用する情報のひとつです。
衛星や受信機が動くことにより、受信機が受信する信号の周波数は、衛星が実際に送信する周波数とは異なって観測されます(ドップラー効果)。その変化分をドップラー周波数と称します。
Receiver Autonomous Integrity Monitoringの略です。測位に最低限必要な衛星数よりも多い数で測位できている場合に、組み合わせと多数決の原理で、測位演算に悪影響を与える可能性のある衛星を特定・排除する仕組みのことです。タイミング製品では、Time-RAIMであるT-RAIMを用いることもあります。
タイミング用途のGNSS受信機にて用いられる用語です。固定点(アンテナ位置とGNSS受信機を特定の位置に固定して運用すること)における、アンテナ設置位置の座標を指します。緯度・経度・高さで表現します。アンテナ設置位置が未知の場合、後述のSSモードを利用することで、自動で固定位置を算出・設定することも可能です。
タイミング用途のGNSS受信機にて用いられる用語です。後述するSSモードで固定位置を算出する過程において、まだ位置精度が十分に収束しきっていない状態の位置を推定位置と呼称する事があります。また、推定位置を算出している過程を、位置推定処理と呼称する場合があります。
一般的なGNSS受信機は、4基以上の衛星信号を受信することで、緯度・経度・高さ・速度・方位・時刻などのパラメータを求めます。一方、タイミング用途のGNSS受信機の場合、無線通信基地局など、アンテナを一度設置した後は、アンテナを動かさずに固定点で運用し続けることもあり、この環境に即した専用の仕組みが必要となります。そこでタイミング製品においては、これらを明示的に区別するため、位置モードと呼ばれるものを定義することがあります。常に移動することを前提として緯度・経度・高さ・速度・方位・時刻を求めるNAVモード、固定点の位置を設定することで時刻のみを求めるTOモード、固定点で利用したいがアンテナ設置位置の座標がわからない場合に利用できるSSモード、などが存在します。
NAVモード:Navigationモードの略です。緯度・経度・高さ・速度・方位・時間など毎秒計算します。TOモードより時刻精度は劣りますが、移動体でGNSS受信機を用いる場合には、位置・速度・方位が毎秒算出できるこのモードを利用する必要があります。本モードで測位するためには、SBASを除く4基以上の衛星を受信する必要があります。
TOモード:Time Onlyモードの略です。予め用意したアンテナの座標をコマンドで入力する事で、時間のみを毎秒計算します。NAV モードと比べて時間の安定性に優れており、固定点での使用に適してします。本モードで測位するためには、SBASを除く1基以上の衛星を受信する必要があります。
SSモード:Self Surveyモードの略です。位置推定処理を実施するモードで、アンテナ設置位置の緯度・経度・高さを計算しつつ、時間も毎秒更新します。TOモードを利用したいがアンテナ設置位置の座標がわからない、といった場合に本モードが適しています。一定期間中に得た位置情報をもとにアンテナ設置位置を高精度に算出し、その後、自動でTOモードに遷移します。デフォルトでは、24時間の測位後にTOモードに自動遷移します。
Dilution Of Precisionの略で、精度劣化率を意味します。小さいほど精度が高いことを示します。この値は、受信しているGNSS衛星の数と、それらの位置関係によって左右され、上空にまんべんなく配置されているとDOP値が小さくなり、測位演算の精度は良くなります。逆に周囲にビルや木々などの遮蔽物があり、受信できる衛星の方角に偏りがあると、DOP値が大きくなり、測位演算の精度は悪くなります。
このDOP値は、かつて、受信できる衛星がまだGPSのみだった頃に、精度確認のために大いに用いられた指標ではあるのですが、近年では受信できるGNSS衛星が非常に多くなったため、DOP値が大きくなりにくい状況になってきていますまた一方で、インドアなどの環境においては、マルチパスの衛星もDOP計算に含めてしまうことがあるため、必ずしもDOP値が小さいから精度が良いとはならず、あまり鵜呑みにすべきではないケースも散見されています。
なお、DOPの種類には、PDOP(位置精度低下率)、HDOP(水平精度低下率)、VDOP(垂直精度低下率)などもありますが、基本的な考え方はすべて同じです。
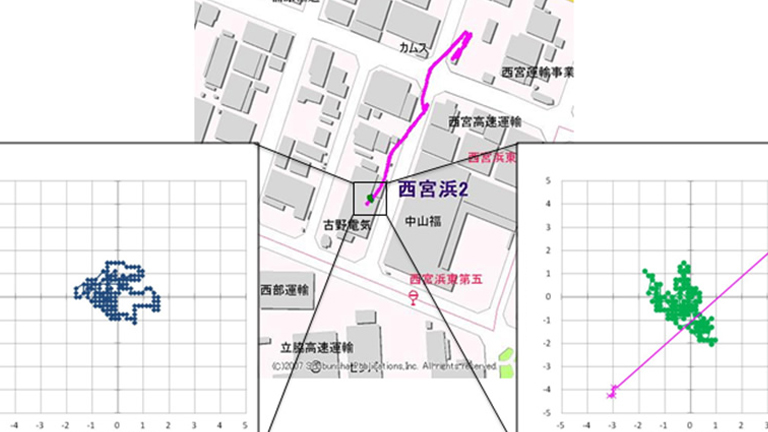
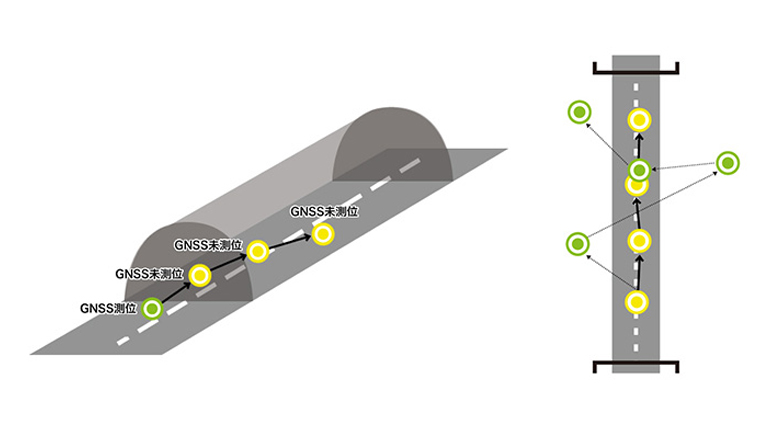
Line Of Sightの略です。ある衛星の信号が、直接、GNSS受信機に接続されているアンテナに到来していることを指します。その衛星と、アンテナの間に遮蔽物がない状態と同義であり、そういった状態にある衛星を、特に、LOS衛星と呼称します。LOS衛星を多く受信できていると、安定した信号レベルが見込めるだけでなく、位置や時刻を精度良く求めることができます。
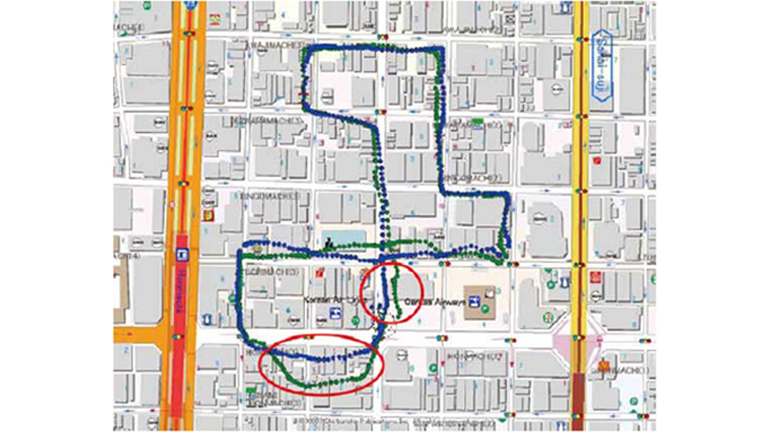
Non Line Of Sightの略です。LOS衛星とは逆で、ある衛星とアンテナの間に、何らかの遮蔽物がある状態を指します。信号が完全に途絶え、衛星断として判定される衛星も、厳密にはNLOS衛星に含まれますが、当社の場合は、それは単に衛星断と呼称し、NLOS衛星とは呼称しないこととしています。衛星から直接の信号を受信できず、周囲の建物に反射して、迂回して入ってくる微弱な信号のみが受信されてしまう衛星のことを、NLOS衛星として定義します。なお、周囲の建物に反射し、迂回して受信される信号は、特にマルチパスと呼称されており、このマルチパスの信号を利用すると、疑似距離の計算やドップラ周波数の計算に誤差が生じるため、測位精度が悪くなる傾向にあることが分かっています。どの衛星がNLOS衛星であるかを適切に判断し、それらを適切にマスクし、LOS衛星のみで測位を行うことが、測位精度を向上させることに繋がります。
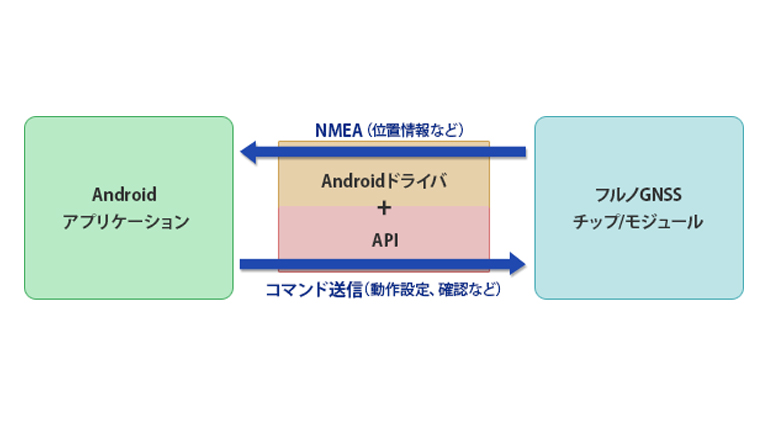
通信ポートを利用してデータを送信・受信するための通信手順です。
GNSS受信機に対して送信するデータをコマンドと呼称します。
GNSS受信機が通信ポートから送信するデータをセンテンスと呼称します。
通信ポートを利用して送信・受信するデータそのものの総称です。
「シリアルデータの出力」と記載する場合がありますが、その場合はセンテンスと同義です。
米国海洋電子機器協会(NATIONAL MARINE ELECTRONICS ASSOCIATION)によって規定された通信プロトコルの略称です。
Acknowledgementから取ったもので、肯定応答を意味します。
GNSS受信機に対してコマンドを送信したとき、そのコマンドが適切であるとして受理された場合に、応答センテンスとしてACKを返します。
Negative-Acknowledgementから取ったもので、否定応答を意味します。
GNSS受信機に対してコマンドを入力したとき、そのコマンドが不適切であるとして無視された場合に、応答センテンスとしてNACKを返します。NACKが返された場合は、送信されたコマンドのフォーマットが適切であるか、チェックサムが適切であるか、等をご確認ください。
Battery Backup Random Access Memoryの略です。GNSS受信機に対してバックアップ電流を印加している場合に限り、バックアップ領域として利用いただける記憶領域です。エフェメリスデータ、アルマナックデータ、コマンド設定値などを、逐次記憶します。起動時、または、リスタート時に、その記憶領域を読み出します。バックアップ電流の印加を中断するか、規定のリセットコマンドを発行することで、記憶情報を消去できます。
FLASH ROMを利用した記憶領域です。
起動時、または、リスタート時に、その記憶領域を読み出します。
GNSSに起因する代表的な障害について、それぞれ技術白書をご提供します。
個々の障害に対して、受信機側ではどのような対策をしているのか、効果の程度、製品の選び方などを時刻同期専門のエンジニアが図表を交えながら解説します。
初めてGNSS受信機をご検討されるお客様はぜひ目をお通しください。

テレコミュニケーション 2021年12月号に掲載された特集記事「イチからわかるネットワーク時刻同期」を、特別にダウンロードできます。
同誌が複数企業を取材し、1社に偏らない、全体を包括した記事に仕上がっております。
誌面の見た目そのままのPDFをご覧いただけます。
同誌に掲載された、当社記事とあわせてご覧ください。
5Gモバイル通信を支える時刻同期の世界をご紹介します。