魚群を探しだす技術
船の真下を探知する魚群探知機に対して、ソナーは船の周囲を探知することができます。
自船を取り巻く魚群の動向をリアルタイムに捉えることで、魚群に対して的確な判断が可能となります。
またソナーは高い探索範囲を誇り、数km先の魚群を探知することができます。
遥か遠方から魚群や海底の状況を把握することで、いち早く漁場を見つけることができるのです。
フルノのソナーは、探知能力をより高められるように信号処理技術の向上やソナー表示方法の改善を繰り返し、高い評価を得ています。
リアルタイム表示Real-time Display
ターゲットの動向をリアルタイムに捉える
周囲の魚群をリアルタイムに把握することで、漁労を支援する
自船の周囲にいる魚群の動向に適した投網をすることで効率的な漁獲ができるようになります。そのためにはソナーでリアルタイムに魚群を探知することが必要となります。
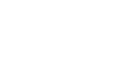
送信間隔を短くする
ソナーは探知レンジ内からの反射エコーを受信して信号処理が完了したのちに、次の音波を送信します。このサイクルをできるだけ早くすることで、ターゲットとなる魚群の動向をリアルタイムに探知できるのです。
フルノの信号処理技術で実現
フルノは長年培ってきた信号処理技術を最適化し、ターゲットに適した最も早い更新周期を実現しています。この技術は3Dソナーにも応用され、より立体的に魚群の動向が捉えられるように進化しています。
- ソナーの送信間隔を早め、魚群をリアルタイム探知
- 長年培ったノウハウにより、ハードとソフト両面で最適化
見やすく安定した映像Easy-to-view and Stable Images
小さなターゲットのエコーを安定表示
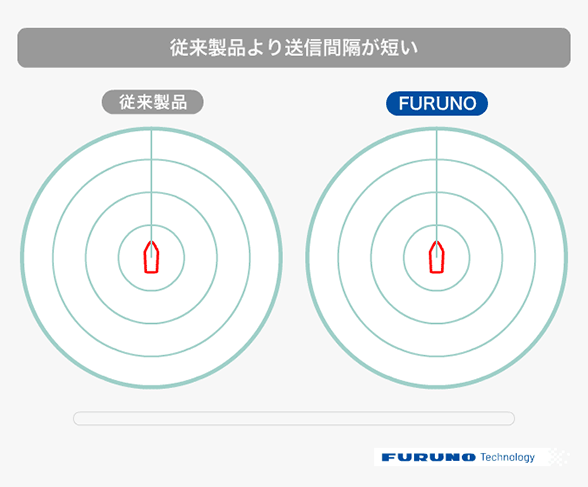
荒れた海況でも安定的な映像を表示する
荒れた海では船体は大きく揺れ、ソナーのエコーも不安定となるため、魚群探知が困難となります。そこで、モーションセンサーを装備することにより、波浪による動揺を瞬時に検出し、信号処理を用いて動揺補正を行っています。この動揺補正を行うことで安定した映像を提供することができるのです。
Auto Filter
船が走行中にソナーの信号を受信するとき、自船の速度によりドップラー効果が発生し、信号の周波数が変化します。ソナーの信号処理では周波数フィルターをかけて干渉や波、機械そのもののノイズなどを除去しているのですが、ドップラー効果による周波数変化を考慮してフィルターの幅を広くとると、十分なノイズ除去が出来ません。
フルノは船舶用電子機器総合メーカーである強みを活かし、GPSから速度情報を取得しドップラー効果による周波数のズレを算出。周波数フィルターをズレに合わせてシフトさせることで、フィルター幅を狭めてより効果的にノイズを落として微弱なターゲットの信号も見られるようにしています。
- 荒れた海況でも安定的に映像を表示する動揺補正
- 総合メーカーならではのGPS技術をソナーに活用
- 周波数フィルターの最適化により微弱なターゲットの信号を探知
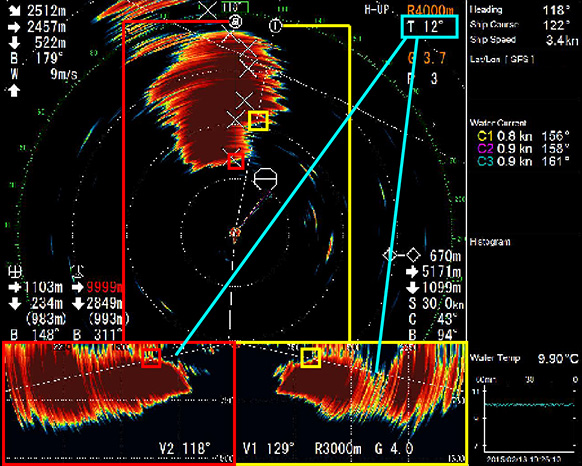
水平探知モードと垂直断面モードHorizontal Detection Mode and Vertical Cross-section Mode
ソナーに映った魚群をより明確に
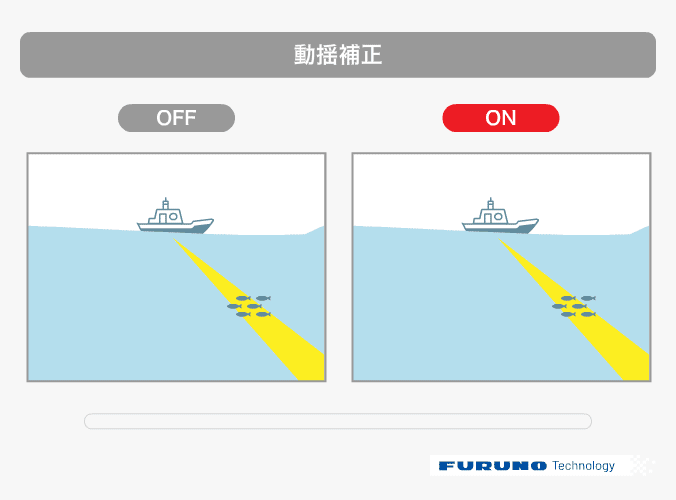
水平探知モードと垂直断面モード
ソナーの映像は一般的に、傘型の探知面を広げたような画面表示になります。水平探知モードでは水平方向にぐるりと探知することで、自船と魚群の水平方向の位置関係(距離や方位角)を把握することができます。
対して垂直断面モードでは海面に対して垂直な断面で海の中をCTスキャンのように輪切りにして見ることができます。そのため、魚群の深さを視覚的に把握することに適しています。
モードを組み合わせてより正確な探知を実現
この水平探知モードと垂直断面モードを組み合わせることで、魚群が自船に対してどの方角にいてどれだけ離れており、かつ深さはどの程度にいるのかを把握することができます。またそれぞれのエコーの強度や範囲から魚群の規模がどの程度のものかも把握できます。
フルノのソナーはこれらのモードを1画面で併記表示する機能を有しており、魚群の状況が瞬時にわかるため投網判断に有効です。
- 2つのモードで魚群の位置や深さを視覚的に提供
- エコーの強度や範囲から魚群の規模を把握可能
- 1画面での併記表示で投網判断に貢献