AGC


ソナーテクノロジー
02 魚群を鮮明に映し出す技術
一言に「魚群」と言っても様々な魚群が海の中に存在します。群れの大きさや密度、遊泳層が異なります。海底近くに張り付く魚もいますし、高速で泳ぐ魚もいます。それらを広い海の中から、確実に捉え、鮮明に映し出すことは漁の適正化、効率化には不可欠です。海底の起伏や自船と魚群との位置関係など、決して同じ状況がない中で、捉えた魚群をユーザーに正しく届けるために、フルノのソナーは振動子そのものから信号処理まで、あらゆる工程にこだわりを持って"見えるソナー"を作り続けています。
ターゲットを他の信号と区別するために
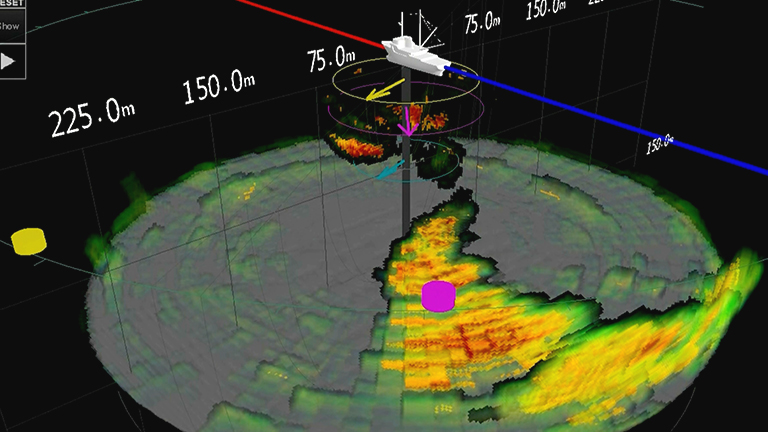
魚群の映像のみを見やすく鮮明に
TVG
遠距離の魚群を見やすくする技術(TVG)
TVG=Time Varied Gain(時間変動利得調整)
一般的に超音波は遠くにいけばいくほど、強度が減衰します。そのため近くにある対象物からの反射は強く、遠いもしくは深いところからの反射は弱く受信します。すると同じ大きさのものでも、対象物との距離によって、反応の強さが異なって表示されてしまいます。そこで、受信機にある増幅器のゲインを時間の経過によって変化させ、返ってくる信号のレベルが一定の基準になるように補正しています。具体的には早く返ってくる=近い信号はゲインを小さく、遅く返ってくる=遠い信号はゲインを大きくしています。
海底と魚群を見分ける技術(AGC)
AGC=Automatic Gain Control(自動利得制御)
海底の反射エコーは非常に強いため、魚群に合わせて調整したTVGではゲインが高すぎることがあります。そこで、海底など強い反射エコーに対してのみ、受信感度を自動的に下げ、見やすい映像に自動調整します。強いエコーは海底だけでなく、航跡や海面反射、厚い表層汚れによる散乱エコーなど様々なものがあります。
POINT!
ここがフルノテクノロジー
広範囲の探査でも魚群の映像を鮮明にするTVG
見やすい映像に自動調整するAGC
ターゲットを正しい方向で捉えるために
偽のエコーを作らない工夫
サイドローブの低減(PPIソナーの場合)
サイドローブによる偽像
ソナーや魚群探知機に使われる送受波器には超音波を発射する際のビーム特性(指向特性)があります。そのビームにはサイドローブと呼ばれる本来送受信したい方向とは別の方向に感度を持つ特性が含まれています。
このサイドローブが大きい場合、誤った方向のターゲットをあたかも見ている先にあるように捉えてしまう「偽像」という現象が発生してしまいます。
サイドローブが少ない送受波器設計
フルノのソナーでは送受波器の配列を工夫し、サイドローブを小さくし、さらに本来送受信したい方向に影響を与えないよう±90°の範囲に入らないように工夫しています。
そうすることで偽像の発生を抑え、誤った情報が表示されにくくなります。
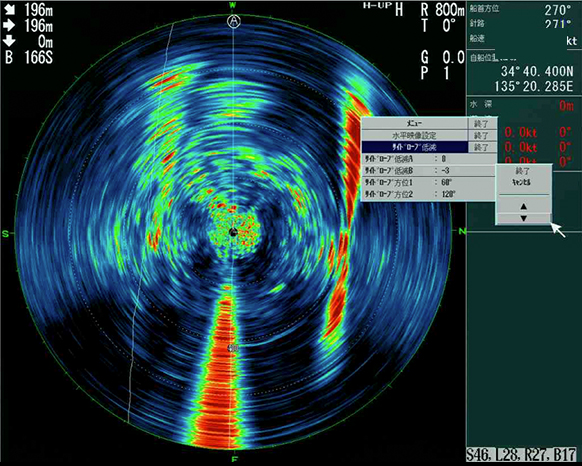
サイドローブの影響が少ない映像
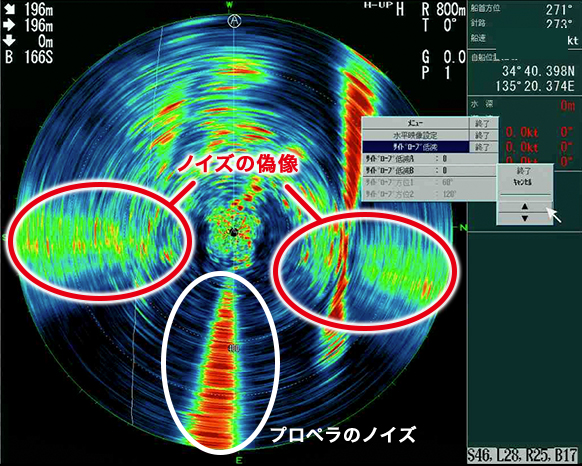
サイドローブによる偽像が発生している映像
POINT!
ここがフルノテクノロジー
サイドローブを小さくする振動子配列
サイドローブの発生角度を調整する振動子配列
偽像の発生を抑え、正確な情報を提供
マグロやカツオ、高速遊泳魚を捕捉し続ける
高速で動くターゲットでも安定表示
高速で移動する魚群を発見する技術(FM変調)
マグロやカツオなどの高速遊泳魚の場合、その移動速度により受信信号にドップラー効果が発生し、信号レベルが低下して見えにくくなります。魚がどのように動き回るのか、かつどれくらいの速度で移動するかを把握することができないため、魚に適したフィルターを設定することはできません。
しかし超音波をFM送信することによって、ドップラー効果による信号レベルの低減を抑え、魚のエコーを捉え続けることができます。
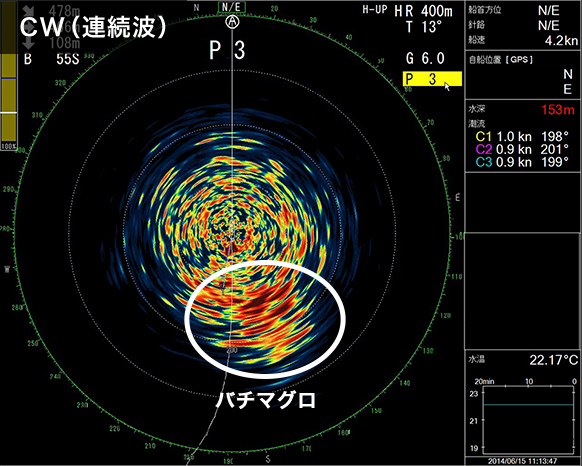
CW(連続波)
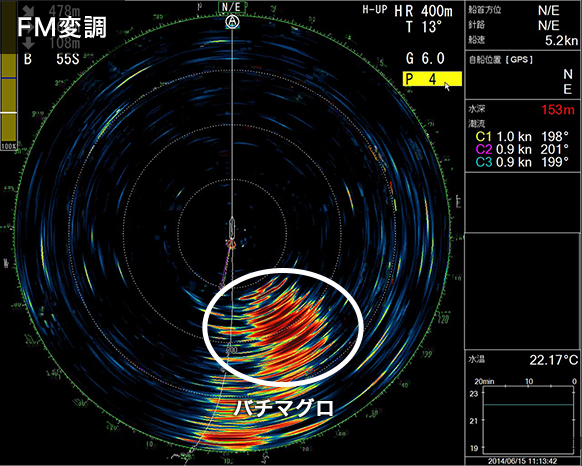
FM変調
POINT!
ここがフルノテクノロジー
FM送信によってドップラー効果による信号レベル低減を抑制
速度のわからない高速移動するターゲットでもエコーを捉え続ける
ソナーテクノロジー


テクノロジー
魚群探知機
レーダー
AIS
GNSS(時刻同期・車載/産業)
車両入退管理
ヘルスケア