フィッシングサポート機能 “SABIKI™モード" ショートムービー



- オートパイロット
自動操舵装置
型式 NAVpilot-300
小型艇に最適!
より快適で刺激的な船上体験を演出するオートパイロット
より快適で刺激的な船上体験を演出するオートパイロット
- プレジャーボート
特長
進みたい方向へリモコンを向けると変針する“ジェスチャーコントローラ”を採用
専用のワイヤレスリモコン“ジェスチャーコントローラ”を使用した、全く新しい操船スタイルを実現しました。
ジェスチャーコントローラを使えば、船上のどこにいても変針や、操舵モード切替などの操作を行うことができ、より自由でストレスのない操船を行うことができます。
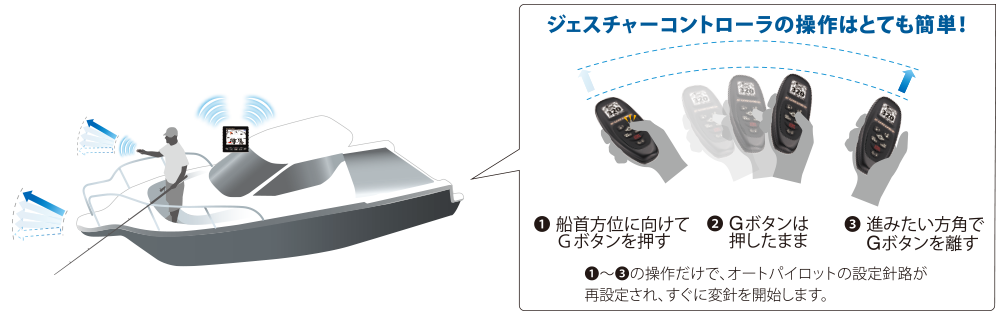
オートパイロット制御部から10 m以内であれば、船上のどこにいても手元のリモコンで目標針路を変更することが可能です。
- 装備状況によって、通信可能な距離は変動します。
- 実際のBluetooth通信はリモコンと制御部で行われます。
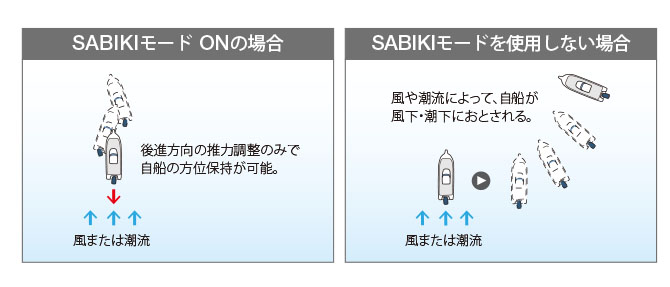
ステアリング操作なしで潮立てを可能にする“SABIKI™(サビキ)モード”
SABIKI™モードはスロットル操作による後進方向の推力調整だけで自船方位を保持し、風上や潮上に船尾を立てることができる後進時の自動操舵機能です。※
フィッシング中の操船負担が軽減できるため、操船者自身が釣りを行うときや、少人数で釣りを行うときにたいへん便利です。
- 風または潮流を受けて、自船の方位保持を行うこと。
- SABIKI™モードは船外機および船内外機専用の機能です。
高度なセルフラーニング(自己学習)機能搭載!
出航から帰港までの艇の動きで自船の特性を学習し記憶します。
さらに、船速や潮流、風、波、ドリフト、トリム(ヒール)アングル等の情報を考慮し、その海況において、安定かつ最適な自動操舵を提供します。
追従発信器不要!船外機・船内外機での簡単装備を実現する“ファンタムフィードバック™”
“Fantum Feedback™(ファンタムフィードバック)”は船外機艇向けに開発されたもので、追従発信器(舵角検出器)の装備なしで高精度の自動操舵を提供できる画期的機能です。1基掛けから複数基エンジンまで、幅広い船外機付きボートに対応しています。
ハイスピードクルージングはもちろん、低速のトローリングでも高精度な保針性能を発揮し、クルージングからフィッシングまで、さまざまなシーンでサポートします。
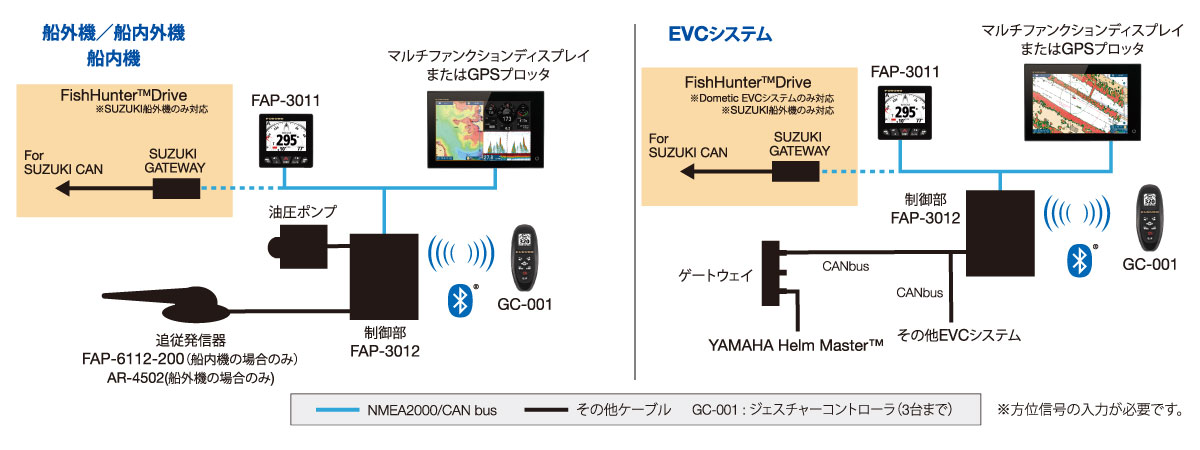
CAN bus(NMEA2000)による優れた装備性と拡張性
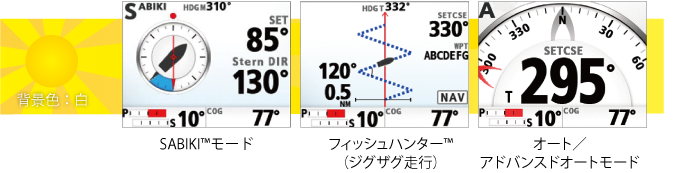
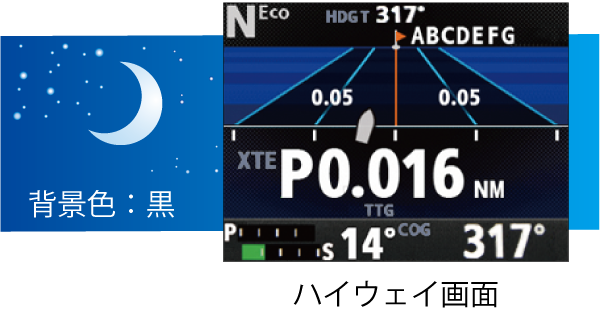
色彩豊かなグラフィック表示
視認性に優れたグラフィカルな情報表示を実現。昼夜それぞれに最適な背景色の切替も簡単に行えます。
安定走行を実現する豊富な操舵モード
- オートモード
潮流や風による影響で船首が振られても、一貫して設定された針路を維持します。
- アドバンスドオートモード
針路上に仮想目的地を設定し、潮流や風の影響を補正しながら、設定針路に沿ったコースを維持します。
- SABIKI™モード
後進時の自動操舵により、フィッシング中の自船方位保持を可能にします。
- NAVモード/ルートトラッキングモード
目的地を設定することで、潮流や風の影響を補正しながら、最短距離で目的地へ誘導します。
プロッタと接続することで、登録された目的地やコースに沿った自動操舵が可能です。
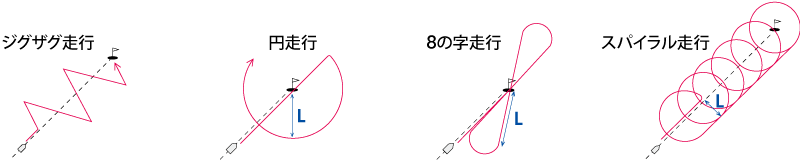
- 4種類のパターン走行が選べる“フィッシュハンター™”
目的地に応じ、4種類のパターンから好きな走行モード選択して実行することができます。
TLL出力可能な魚探やソナー、レーダーとの連携により、ターゲットとなる魚群や鳥のポイント情報をプロッタ上へ入力でき、フィッシュハンター™のより効果的な活用が可能です。
落水者救助 (MOB)の際にも有用な機能です。
各社電気制御エンジン(EVC)システムに接続可能
専用のインターフェイスユニットなしで、簡単にEVCシステムとの接続が可能です。※
YAMAHA Helm Master®
YANMAR VC10®
SEASTAR SOLUTIONS OPTIMUS
- 詳しい対応状況については、販売店または当社におたずね下さい。
SUZUKIとの共同開発によりエンジン制御を実現
オートパイロットの次元をあげる”FishHunter™Drive”
“FishHunter™Drive”は、NAVpilot-300と主要なSUZUKI船外機モデル※3を組み合わせることで、操舵だけでなくエンジン制御を自動的に行う機能です。
FishHunter™Drive機能を有効にすることにより、オートパイロット走行に5つの機能が追加され、より快適なボーティングを実現します。
- 3 対象船外機についてはSUZUKI販売店にお問い合わせください。
1. 定速制御機能
設定した船速を維持するようにエンジン回転数をコントロールします。
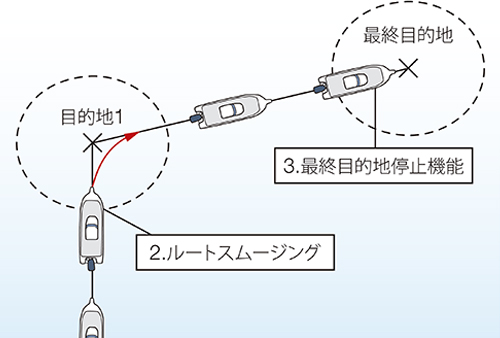
2. ルートスムーシング
変針時に自動的に減速し、オーバーシュートが少ないカーブを実現します。
3. 最終目的地停止機能
最終目的地到着時にポイント上で停止するよう自動減速を行います。
またその場に留まるようポイントロック機能へ遷移します。
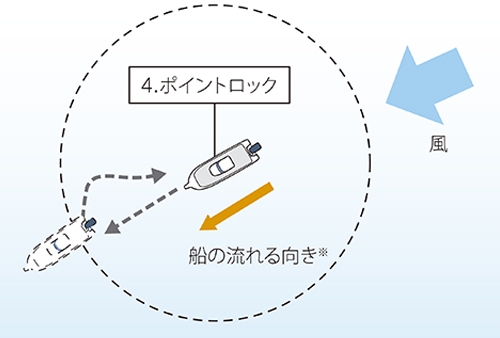
4. ポイントロック ※ 本機能を利用するには追従発信器(舵角検出器)が必要です
モード開始時の位置に船を保持します。船尾を風上に向け、船を停止させてください。
風や潮等の外乱によって船体が船首側に流されると舵とエンジンを制御し、自動で元の場所へ戻ります。風向センサや潮流計は不要です。
5. SABIKIロック
後進時の自動操舵およびエンジン制御により、フィッシング中の自船方位保持が可能となり、風上に船尾を立てることができます。
従来のSABIKI™モードで必要だったスロットル操作が不要となり、操船者もフィッシングに集中することができます。

安全にお使いいただくために
FishHunter™Drive機能は、お客さまの航行支援として動作することを目的としています。海況やセンサーの状態によっては、船体が予期しない動作をする可能性があるため、航行時には本機能のみに依存しないようにしてください。 本機能を使用する際は、以下の注意点に留意してお客さまの責任で判断を行なってください。
- 周囲の安全をしっかりと確認して使用してください。
- プロペラは自動で回転するため、水中に入ると回転中のプロペラに接触したり巻き込まれて重傷を負ったり、死亡する可能性があるので、以下の点にご注意ください。
- 船体近くの水中にいることは安全ではありません。非常に危険です。
- 船体は突然どの方向にも動く可能性があるため、落水にご注意ください。
- 取扱説明書をよく読み、安全に使用してください。
仕様
指示部
画面タイプ
4.1型カラー液晶
解像度
QVGA (320 x 240)
バックライト
700 cd/m²
制御部
操舵モード
手動、オート、ドッジ、NFU(非追従操舵)、ターン、アドバンスドオートモード※1、NAVモード※1、フィッシュハンター™※1、SABIKI™モード※2、ポイントロック※3 ※4、SABIKIロック ※2 ※3
※1 航法データが必要
※2 船速データが必要
※3 FishHunter™Drive機能
※4 位置データおよび追従発信器が必要
船速制御
定速制御※、ルートスムージング※、最終目的地停止※
※ FishHunter™Drive機能
警報
偏角、ワッチ
※ 航法データが必要
舵角制限
1~20 度/秒
ジェスチャコントローラ(ワイヤレスリモコン)
表示器
1.28型 LCD(モノクロ)
解像度
128 x 128
インターフェイス
入出力ポート数
NMEA2000 x1, CAN bus x1 (EVCシステム接続)
接点信号(入力) x3
USB x 1 (保守用)
入力 (NMEA)
(NMEA2000)
059392/904, 060160/416/928, 061184, 065240,126208/464/720/992/996, 127237/250/258,128259, 129025/026/029/283/284/285/538, 130577/818/821/827/841
出力 (NMEA)
(NMEA2000)
059392/904, 060928,
126208/464/720/993/996/998,
127237/245,130816/821/822/823/827/841
防水性能
制御部
IP55
操作部
IP56
ジェスチャコントローラ
IP65/67
その他
電源
制御部 DC 12-24 V、0.22 A以下
操作部 DC 15 V、0.29 A以下
ジェスチャーコントローラ DC 3 V、単4乾電池2本
構成品
標準品
操作部
FAP-3011
制御部
FAP-3012
ジェスチャーコントローラ
GC-001
工事材料、予備品
オプション品
操作部
FAP-3011
ジェスチャーコントローラ
GC-001
ハンガーキット
ケーブル組品
ジャンクションボックス
ポンプユニット
追従発信器
FAP-6112
YAMAHA HM ゲートウェイ
系統図
各種ダウンロード

| 名称 | 最終更新日 |
|---|---|
| 2026年02月27日 | |
| 2024年04月15日 |
製品に関するお問い合わせ
新規商談、故障・修理、仕様詳細について
- 外観・仕様に関しては予告なく変更する場合があります。予めご了承ください。

オートパイロット製品一覧


条件に一致する製品はありません。
船舶
ワークボート(官公庁船・作業船)
プレジャーボート
航海機器
船舶用ソリューション
商船機器トレーニング