.jpg)
自動運転レースとAI開発者人材育成のこれから

2016年01月05日
2015年11月27日、国土交通省は「2020年までに高速道路での逆走事故をゼロに ~道路と自動車が連携、さらに安全な高速道路を目指す取り組み~」を発表した。これに伴う記者会見で、石井啓一国土交通大臣はETC2.0や自動運転による自動ブレーキの活用についても検討すると発言した。
このように最近、クルマに係る社会課題を解決する方法のひとつとして、自動運転に注目が集まることが多い。
自動運転については、日米欧、韓国、そして中国の自動車メーカー各社、さらに各国・各地域の政府が産学官連携による研究開発を進めている。
日本では、トヨタ、日産、ホンダが一般公道での走行実験の模様を公開。政府の活動としては、内閣府を中心として関係省庁が連携する「戦略イノベーション創造プログラム(SIP)」、及び内閣府が主導する「近未来技術実証特区」が軸足となる。2つプログラムはともに「2020年・東京オリンピックまでに研究成果をあげること」を命題としている。
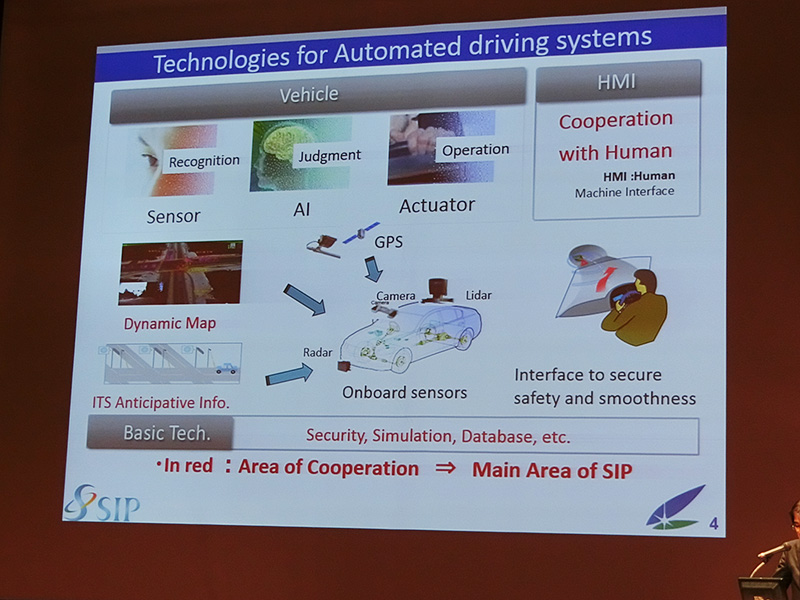
総理府の戦略的イノベーション創造プログラム(SIP)に関する国際会議の模様。自動運転でGPSの重要性を強調。
国土交通省・自動車局と経済産業省・製造産業局は、SIPに参画すると同時に2省間で「自動運転を産業として考える」との立場から自動車メーカーと連携を図っている。
そこで議論の中核になっているのが「競争領域と協調領域」という考え方だ。
競争領域とは、カメラ、レーザー、レーザーレーダー(通称ライダー)等、車両に搭載する各種センサーの技術革新。そして、スマートフォンと車載器との連携におけるビックデータを活用したビジネスモデル等を指す。
一方の協調領域とは、インフラストラクチャー(インフラ)に関わる分野だ。路車間通信(V2I)、車車間通信(V2V)での、ETC2.0等の狭域通信(DSRC)や760MHz帯域に対応する通信機器の整備は国が行う。
こうした「目に見えるインフラ」の他に、自動運転で必要なインフラがデジタルインフラストラクチャー。つまり、地図情報だ。SIPではこれを「ダイナミックマップ」と呼ぶ。
高精度な3D地図を実測することで構築した上で、走行車両の「1秒毎の走行データ」をプローブ情報としてクラウドで解析するシステムだ。「ダイナミックマップ」こそ、まさに協調領域であり、自動車メーカー各社は自社情報を“一定条件”の下に提供することになる。
課題はこの“一定条件”なのだが、その詳細については取材をさらに進めて、別の機会に紹介したい。
もうひとつ、協調領域で重要な要素がGNSSである。
GNSSとは、グローバル・ナビゲーション・サテライト・システムの略称。衛星性測位システムを指す。90年代からアメリカの衛星測位システム・GPSのデータを一般公開されたことでカーナビを中心に世界各地で急速に普及した。近年は安全保障の観点、及び「モノのインターネット化(IoT)」の重要性が増したこと等で、ロシアのGLONASS、欧州委員会(EC)のGalileo、中国の北斗(BeiDou)、インドのIRNSS、そして日本のQZSS (準天頂衛星)の研究開発が進んでいる。
テレビや新聞は「自動運転はGPSを使って…」と報道することが多い。
確かにこの表現に間違いはないが、マスコミを含めて自動運転に対して「GPSありき」というイメージが強いと思う。
ところが、実際には違う。
2015年11月上旬、筆者が都内で日産の自動運転実験車に同乗走行した際、「GPSは重要視していません」(開発責任者)という。同車は、ごく一般的なGPSにより“大体の現在位置”を割り出し、事前に車載データに組込んだ“地図上の車線の情報”と照合。さらに車載カメラによる画像認識で周囲を確認することで、“リアルタイムでの現在位置”を認識しているという。「ご承知の通り、GPSでより精度を上げるためにはコストがかかる。また、そもそも論ですが、トンネルではGPSは使えない」と指摘した。
こうした声は日産だけでない。筆者がこれまで直接取材したその他の日系メーカー、欧米・韓国・中国の自動車メーカーの自動運転技術関係者のほとんどが指摘する点だ。
現在、車載のカーナビゲーションに組込まれているGNSS受信機の精度は「メートル級」だ。これを画像認識やDSRCによって補正することで、自動車メーカー各社は自動運転に応用しようとしている。

「リーフ」をベースとした、日産の自動運転実験車。

日産の自動運転システムの外観。

都内の一般道路を走行する、日産の自動運転実験車の車内。
話は変わって、舞台はカリフォルニア州ソノマレースウエイ。ワインの名産地として知られるサンフランシスコ郊外のナパバレーの丘陵地帯にある、1周約4キロのサーキットだ。
ここで2015年7月、アウディが主催した自動運転実験車の同乗試乗会があり、筆者も参加した。
驚くことに、その走行速度は直線路で時速230キロに及んだ。クルマの姿勢が左右に大きく振られるS字コーナーでも時速160キロで切り返しを行った。
アウディはこうしたサーキット走行用の自動運転車を2014年9月、F1ドイツグランプリが開催あれるホッケンハイムサーキットで公開実験走行を行っていた。だが、ジャーナリスト等を助手席に乗せた同乗走行体験は、このソノマレースウエイでのイベントが世界初となった。ちなみに、運転席にはアウディの若手エンジニアが“運転管理者”として座ったが、自動運転走行モード中は、ステアリグ、アクセル、ブレーキ、シフトレバー等の機器には一度も手を触れていない。
この自動運転車、「GPSありき」のシステムで走行している。
最初に行う作業は、RTK(リアル・タイム・キネマティック)のGPSによるコースの測量だ。コース内に基地局を置いたうえで、コースの右端と左端それぞれ沿って時速50キロ程度のゆっくりしたペースで2周する。これによって、「センチメートル級」の精度でコース地図が生成される。ソノマレースウエイは丘陵地帯に沿ってコースがレイアウトされているため、高低差が大きい。GPSでは、垂直方向の精度は平面方向の約3倍と言われており、一般的なGPS「メートル級」では、ソノマレースウエイ用の走行データとして不十分なのだ。
こうして得られた3Dマップの上で、アウディの自動運転実験車は走った。驚くべきことに、カメラやミリ波レーダー等の外部状況を直接監視するセンサーは搭載していない。つまり、3Dマップという点郡座標のなかで、「クルマの動きを実際にとるセンサー」がリアルタイムで路面状況と走行状況を把握しているのだ。さらに、スタンフォード大学と共同研究する人工知能によって「1~1.5秒先の動き」を、「カメラ等の直接監視センサーなし」で解析し、そのデータを車載メインコンピュータにフィードバックしているという。
自動運転サーキット走行という「限られた条件で最高のパフォーマンス」を求める場合、GPS等のGNSSは極めて有効である。
日本では国土地理院が全国約1300カ所に「電子基準点」を設けている。地震に対する予防、及び地震発生後の地形変化を解析する目的だ。と同時に、「電子基準点リアルタイムデータ」をRTK式GNSSでネットワーク化するという役目もある。
現在は「GNSSに頼らない自動運転」が主流の日本の自動運転。2018年以降の準天頂衛星が4基体制となることも併せて、電子基準点の活用も含めた「GNSSに頼る度合いが高い自動運転」の開発を進めて欲しいものだ。

アウディがサーキット専用の自動運転車。2015年7月、カリフォルニア州ソノマレースウエイにて。
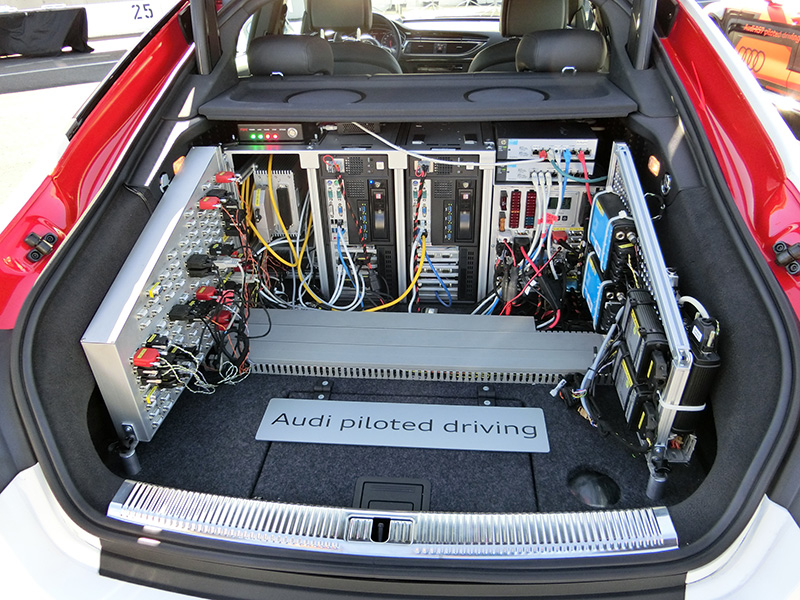
RTKによるGPSを利用するアウディの自動運転システム。

専門は世界自動車産業。その周辺分野として、エネルギー、IT、高齢化問題等をカバー。日米を拠点に各国で取材活動を続ける。
一般誌、技術専門誌、各種自動車関連媒体等への執筆。
インディカー、NASCAR等、レーシングドライバーとしての経歴を活かし、テレビのレース番組の解説担当。
海外モーターショーなどテレビ解説。
近年の取材対象は、先進国から新興国へのパラダイムシフト、EV等の車両電動化、そして情報通信のテレマティクス。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)

.jpg)
.jpg)

.jpg)


